

作品名稱:兩棲水上垃圾收集裝置
學校名稱:沈陽工學院
參賽隊伍:青云志
隊伍編號:199718
參賽學生:張森 焦海洋 王惟娜
指導老師:呂堯 周瑩
投票日期:2024年10月08日 00:00->2024年12月05日 15:00
請在微信端進行投票。點此掃描二維碼。
一、設計目的
隨著我國經濟的快速發展,人民物質生活水平的大幅度提高,公眾的日常生活、生產中產生了各種大量的廢棄物。這些來源復雜、種類繁多的各類垃圾嚴重破壞了社會人文景觀和自然環境,我們以為此付出了慘痛的代價。值得注意的是,過去未被重視的一種水域環境污染——水上垃圾污染也是越來越嚴重。迅速的城市化和工業化進程、旅游業的發展、民眾環保意識的淡薄,等等因素導致了這些廢棄物的產生,使得江河、湖泊和港口,甚至近海的水面漂浮垃圾的污染日益嚴重,尤其是流經城鎮生活區域的河流段。大量水面垃圾的污染得不到及時處理將會產生二次污染物,不僅破壞了生活水源,威脅到以這些水體作為生活用水的居民的身體健康,也影響了市容環境。
治理水上垃圾的方法:
可以在需要清理的地方安裝兩個排水網,防止垃圾污染更多的水資源;人工清理水面上的垃圾;嚴禁亂丟垃圾;加強人們對水資源保護方面的教育。
根據治理水上垃圾的這些方法可以看出,將水上垃圾從水中清理出來是主要方法,基于我國目前的水上垃圾污染的現狀以及治理水上垃圾的主要方法,對水面漂浮垃圾的處理一般是透過人工打撈,而傳統的打撈方式為人工站在小型船只上或者岸邊,采用網兜和長柄夾采集方式進行水面垃圾的打撈作業,該方式不僅打撈效率和效果等方面均存在明顯的缺陷,而且打撈人員也存在可能落水的危險。對于以上情況,我們團隊研究設計了一個擁有水陸兩棲的,節能減排的,帶有視覺識別功能的“履帶式兩棲水上垃圾收集車”。
二、作品的主要結構及工作原理
1. 工作原理:
履帶式兩棲水上垃圾收集車總體結構分為機械結構部分及電氣控制部分等兩部分。機械結構部分主要由電動推桿、履帶、氣囊、傳送帶、螺旋槳、垃圾箱等結構組成。電氣控制部分主要由太陽能板,直流減速電機,太陽能控制器,攝像頭,Arduino Uno開發板,視覺識別模塊,藍牙模塊等結構組成;作品整體規格:長:1290mm 寬:1142mm 高:1050mm
履帶式兩棲水上垃圾收集車工作時利用太陽能板進行發電,配備一個蓄電池儲存電能;太陽能板與光線強度強的方向保持一致,大大提高太陽能的利用率、充分發揮組件的發電能力。
在履帶式兩棲水上垃圾收集車運行時,利用 Arduino Uno開發板上提前編譯好的程序,控制履帶式兩棲水上垃圾收集車的運動路徑及從陸地到水面,收集垃圾,返回陸地等動作的自動運行。當車子通過24V 60r/min直流減速電機帶動履帶從陸地運動到水面的相應位置后,螺旋槳開始轉動進而車開始在水面上工作,與此同時電動推桿垂直做向上運動來調整傳送帶的斜度,在通過視覺識別模塊來鎖定垃圾的位置,再通過傳送帶的作用,垃圾就被傳到了垃圾箱里,從而完成將水上垃圾回收進垃圾桶的一系列動作;垃圾收集完畢后,通過 Arduino Uno開發板的控制來完成車返回陸地的指令。
我們不僅通過 Arduino Uno開發板開始編譯程序來控制履帶式兩棲水上垃圾收集車運動,還可以通過藍牙模塊隨時進行遠程的對車的操控。履帶式兩棲水上垃圾收集車還配有一個攝像頭和一個視覺識別模塊,分別負責觀察四周環境和檢測四周垃圾的位置的工作,在工作期間履帶式兩棲水上垃圾收集車前方遇到高于車殼高度的障礙物會自動停止工作。
2. 機械結構部分:
2.1電動推桿:
電動推桿(圖2.1所示)是一種新型的電動執行機構,電動推桿主要由電機、推桿和控制裝置等機構組成的一種新型直線執行機構,可以實現遠距離控制、集中控制。電動推桿在一定范圍行程內作往返運動,一般電動推桿標準行程在,100,150,200,250,300,350,400mm,特殊行程也可根據不同應用條件要求設計定做。
電動機經齒輪減速后,帶動一對絲桿螺母。把電機的旋轉運動變成直線運動,利用電動機正反轉完成推桿動作。如通過各種杠桿、搖桿或連桿等機構可完成轉動、搖動等復雜動作。通過改變杠桿力臂長度,可以增大或減小行程。齒輪傳動形式:電機通過減速齒輪后帶動安裝于內管的小絲桿,帶動與之連接一起的做軸向運行螺母,至所設定的行程時螺母觸角壓住限位開關斷開電源,電機停止運動(反向與之相同)。
推桿參數:24V 行程450mm,速度10mm/s,扭矩900N

圖2.1
2.2履帶:
當電機的動力傳遞給驅動輪時,驅動輪順時針拉動履帶,從而在地面履帶和地面履帶之間產生相互作用。根據力的作用和反作用原理,軌道沿水平方向對地面施力,地面對軌道施力,從而使履帶運動起來。履帶與車殼相連接從而實現車在陸地上行走這一功能,且在地面上履帶承載著車的全部重量。
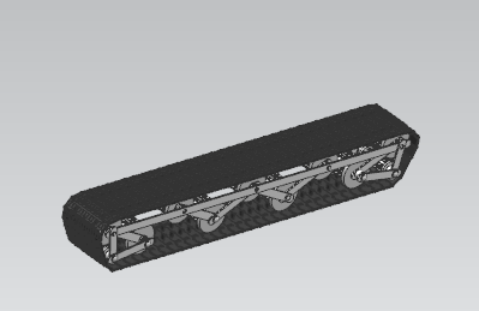
圖2.2
2.3氣囊
在一個密封的容器中充入氣體之后得到的裝置叫做氣囊。氣囊與車殼相連并放在兩邊,使車在水中受力均勻達到平衡狀態,并且在水中承載著車的全部重量。
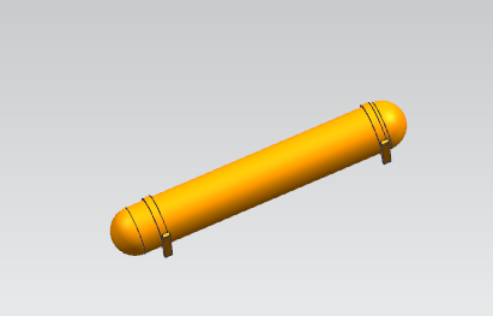
圖2.3
2.4傳送帶
傳輸系統的運輸貨物的動力來自于電機,當電機啟動后,會帶動齒輪的運行,齒輪之間的嚙合帶動了鏈條做周期性的循環轉動,因而達到了運輸的效果。我們還在傳送帶的兩邊加了擋板目的是為了防止垃圾從傳送帶的兩側掉落,并且傳送帶上設有孔洞和傳送棱,它們的作用分別是讓水和垃圾分離和防止垃圾沿著傳送帶滾落。
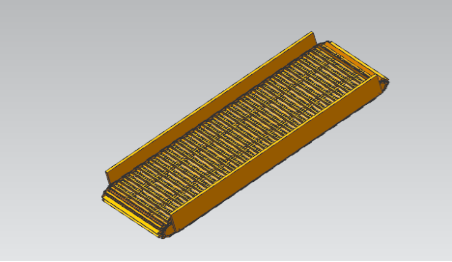
圖2.4
2.5螺旋槳
螺旋槳是指靠槳葉在空氣或水中旋轉,將發動機轉動功率轉化為推進力的裝置,可有兩個或較多的葉與轂相連,葉的向后一面為螺旋面或近似于螺旋面的一種推進器。螺旋槳裝配在車的兩側使車可以在水中運動,其中車在水上的轉向就是通過一側的螺旋槳停止旋轉,另一側的螺旋槳旋轉來實現的。我們采用的是型號T60pro的螺旋槳。螺旋槳的規格:長:160寬:100高:147。

圖2.5
2.6垃圾箱
垃圾箱是用來存儲傳送帶在水面運上來的垃圾。垃圾箱放在車殼的上面在傳送帶的后面,由于運上來的垃圾有水,所以我們在垃圾箱的低部設有空洞,目的就是為了將這些水給排出去。
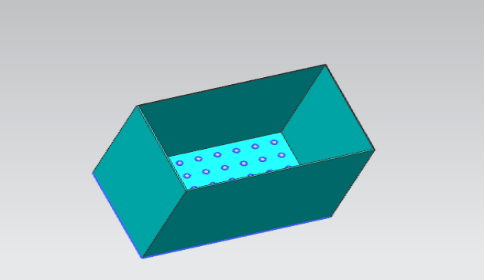
如圖2.6
3. 電氣控制部分:
3.1太陽能板:
采用單晶硅太陽能板(圖3.1所示),多個太陽能電池片按組裝的組裝件發電,通過吸收太陽光,將太陽輻射能通過光電效應或者光化學效應直接或間接轉換成電能,是太陽能發電系統中的核心部分。功率:6W;開路電流1.1A;工作電壓:6V;尺寸:長:279mm、寬:180mm、厚:5mm;工作電流:1A;工作溫度:-40°C~85°C;開路電壓:7.2V;功率公差:±3%。
 |
圖3.1
3.2直流減速電機:
直流減速電機(圖3.2所示),即齒輪減速電機,是在普通直流電機的基礎上,加上配套齒輪減速箱。齒輪減速箱的作用是,提供較低的轉速,較大的力矩。同時,齒輪箱不同的減速比可以提供不同的轉速和力矩。這大大提高了,直流電機在自動化行業中的使用率。減速電機是指減速機和電機(馬達)的集成體。這種集成體通常也可稱為齒輪馬達或齒輪電機。其優點在于節省空間,可靠耐用,承受過載能力高;能耗低,性能優越,減速機效率高達95%以上;振動小,噪音低,節能高;經過精密加工,確保定位精度。
直流減速器參數:
24V 30W 60r/min 80kgf.cm(最大扭力)

圖3.2
3.3 Arduino Uno開發板
以ATmega328 MCU控制器為基礎——具備14路數字輸入/輸出引腳(其中6路可用于PWM輸出)、6路模擬輸入、一個16MHz陶瓷諧振器、一個USB接口、一個電源插座、一個ICSP接頭和一個復位按鈕。它采用Atmega16U2芯片進行USB到串行數據的轉換。Uno PCB的最大長度和寬度分別為2.7和2.1英寸,USB連接器和電源插座超出了以前的尺寸。4個螺絲孔讓電路板能夠附著在表面或外殼上,工作電壓為5V。同時,只需要一條USB數據線連接至電腦。我們的履帶式兩棲水上垃圾收集車就是以Arduino Uno開發面板作為我們作品的程序開發平臺,根據現場的實際情況編譯程序對履帶式兩棲水上垃圾收集車的各個動作進行控制。 Arduino Uno開發板的規格:長:75mm寬:55mm高:15mm。
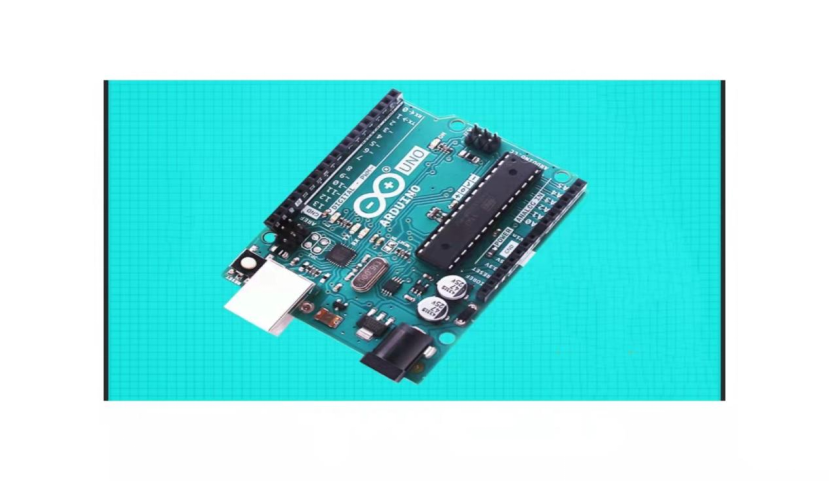
圖3.3
3.4太陽能控制器
 |
圖3.4
3.5攝像頭
履帶式兩棲水上垃圾收集車配有一個攝像頭,并將這個監測攝像頭配備在了車體前圖(3.6所示),負責觀察車身四周的環境,當履帶式兩棲水上垃圾收集車前方有出現高于車橋地盤的障礙物時自動停止工作。
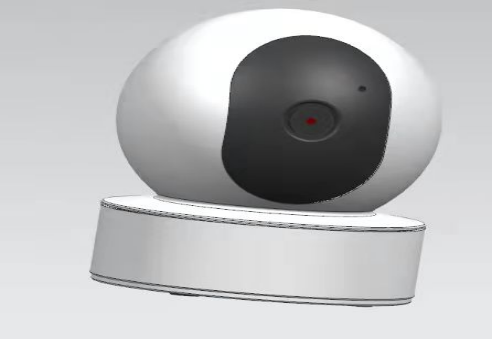
圖3.5
3.6藍牙模塊
藍牙采用CSR主流藍牙芯片,藍牙V2.0協議標準。串口模塊工作默認電壓3.6~6V,一般用5V單片機配套。波特率為4800,9600,19200,38400,57600,115200用戶可設置。默認9600。核心模塊尺寸大小為:28mm×15mm×2.35mm。工作電流:配對中:30~40mA配對完畢未通信:2~8mA通信:8mA。休眠電流:無休眠。可以與藍牙筆記本電腦、電腦加藍牙適配器、PDA等設備進行無縫連接。我們的履帶式兩棲水上垃圾收集車在Arduini開發板上擴展一個藍牙模塊,目的是為了達到可遠程控制的效果。

圖3.6
3.7視覺識別模塊
視覺識別模塊采用的是雙目攝像頭,雙目攝像頭是利用仿生學原理,通過標定后的雙攝像頭得到同步曝光圖像,然后計算獲取的2維圖像像素點的第三維深度信息。 具體點說就是, 人眼是很容易對一個物體的距離進行定位,但當人閉上其中一個眼睛后,定位能力就會下降很多。雙攝像頭就是模擬人眼的應用。也就是測距離的話,就是通過算法算出,被拍攝物體與左/右攝像頭的角度θ1和θ2,再加上固定的y 值(即兩個攝像頭的中心距),就非常容易算出z 值(即物體到攝像頭的距離)。履帶式兩棲水上垃圾收集車通過采用的視覺識別技術來實現,車可自主搜尋水上垃圾,并進行收集的這一過程。
雙目攝像頭的型號我們采用的是HLK-RK625-2,它的工作電壓是5V,它的長:39mm寬:28mm高:21mm。
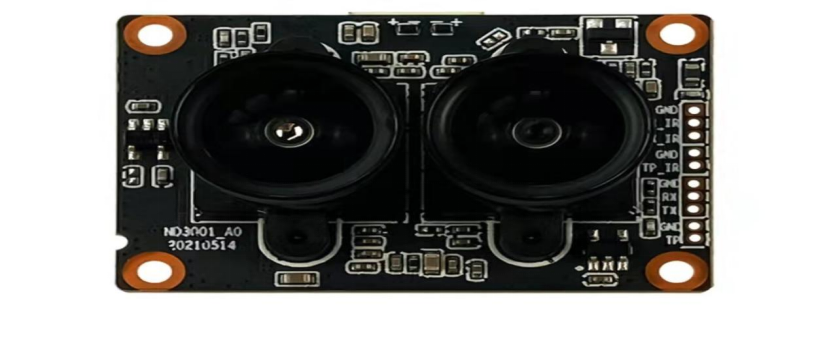 圖3.7
圖3.7
三、創新點及優勢
1.與傳統機械不同,履帶式兩棲水上垃圾收集車采用了新能源裝置,使得垃圾收集過程變得更加綠色環保,降低因燃料產生的成本,順應時代發展,更具發展前景;
2.所使用的攝像頭具有識別前方障礙物以實現避障的功能;
3.履帶式兩棲水上垃圾收集車配有履帶,可以實現車在陸地與水面之間的來去自如,不用人為的將車抬進水中,省去了很多的人力資源。
4.履帶式兩棲水上垃圾收集車裝配的傳送帶與以往的傳送帶不同,我們在傳送帶上打了空洞加了傳送棱和兩側的擋板,目的是為了將垃圾上的水過濾出去,防止垃圾從兩側掉落和從傳送帶上滾落。
5.利用Arduino Uno開發面板對作品整體工作程序進行編寫控制,根據實際情況自動化運行各個動作,并采用視覺識別模塊和藍牙模塊分別起到了對垃圾的定位和對車的遠程控制的作用,多種控制渠道,操作簡單方便,大大降低了因人力而產生的成本。
四、未來展望
1. 可根據垃圾分類的原理,而使履帶式兩棲水上垃圾收集車根據不同的垃圾進行智能分類,以實現更加智能、自動的功能;
2. 對車身材料進行升級,使設備總體重量更加輕便且制作成本降低并且由較強的剛度;
3. 對設備部分機械結構進行優化,使收集垃圾的效率更上一層樓;


