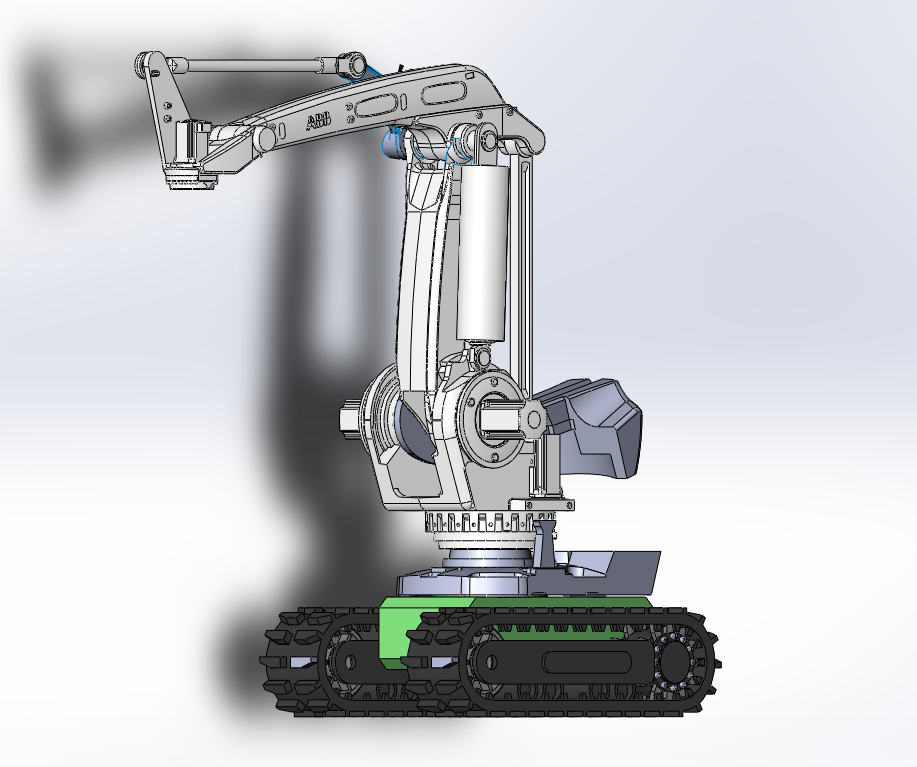
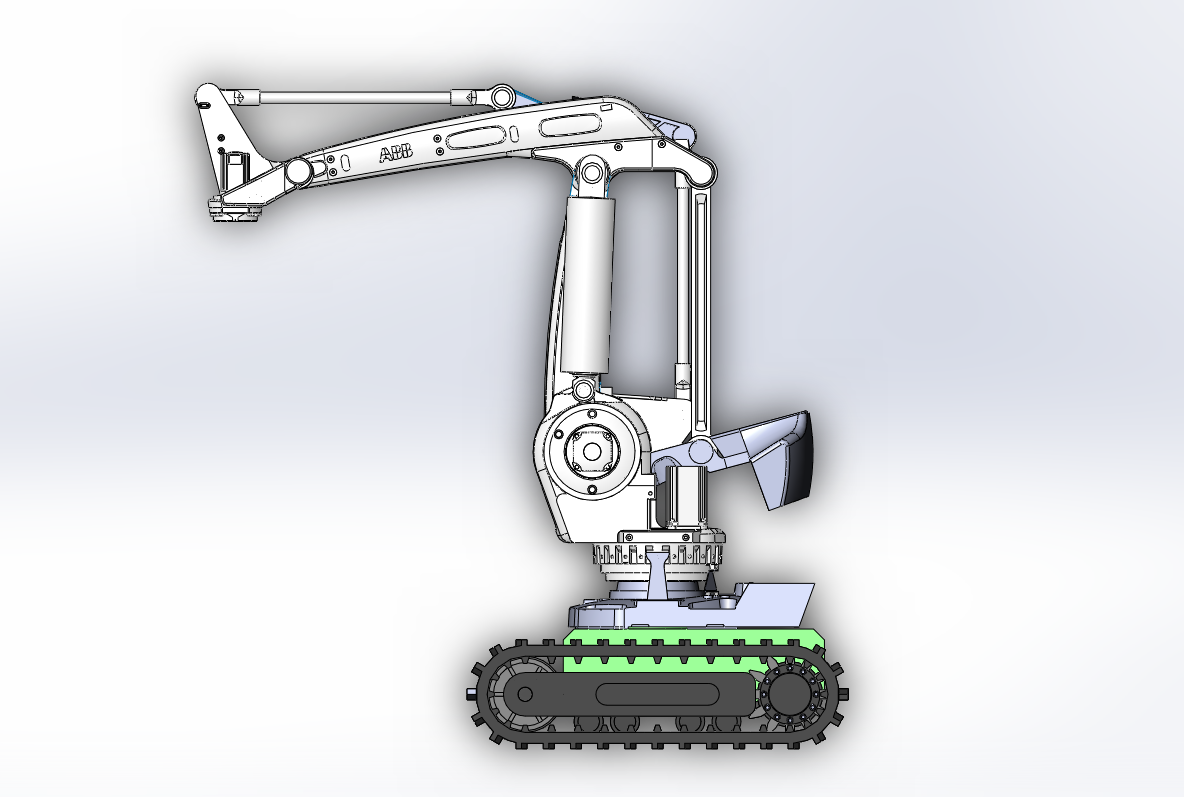
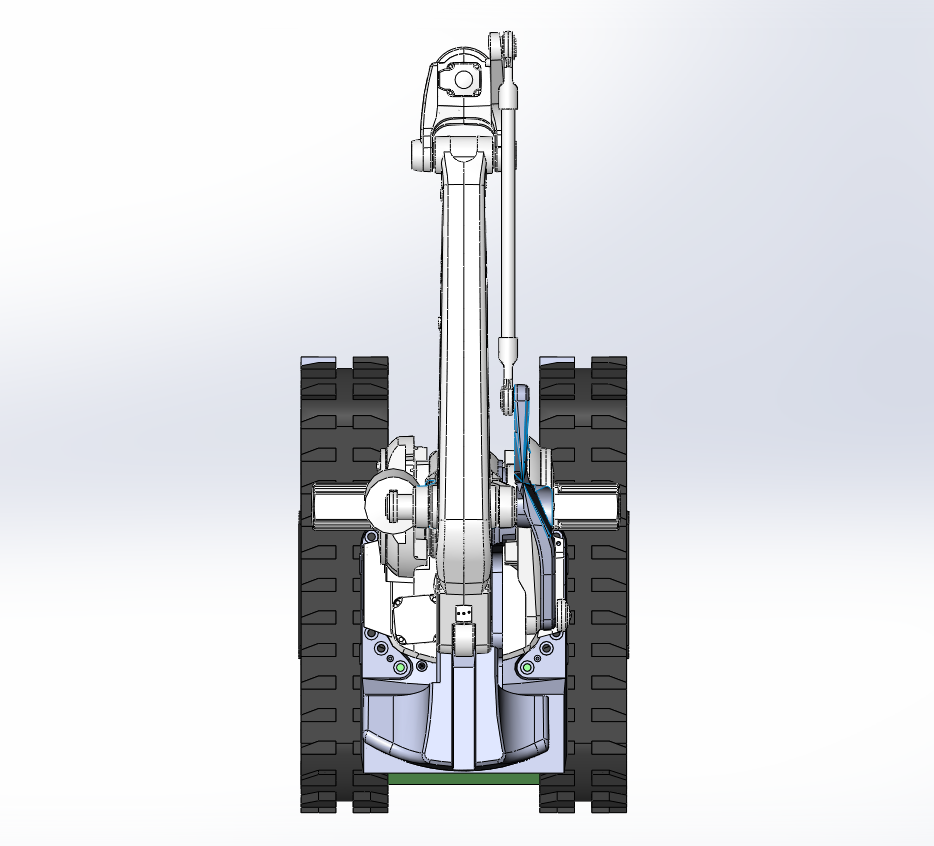
作品名稱:移動式碼垛機器人
學校名稱:武漢東湖學院
參賽隊伍:銀河護衛隊
參賽學生:胡錦程 郭弛 李晨煜
指導老師:張榮 楊貽婷
社會背景
隨著我國經濟的持續發展和科學技術的突飛猛進,使得機器人在碼垛、涂膠、點焊、弧焊、噴涂、搬運、測量等行業有著相當廣泛的應用。現在有很多個原因,包括包裝的種類、廠環境和客戶需求等將碼垛變成包裝工廠里一塊難啃的骨頭。為了克服這些困難,碼垛設備的各個方面都在發展改進,包括從機械手到操縱它的軟件。最近市場.上對靈活性的需求不斷增長,這一個趨勢已經影響到了包裝的多個方面,生產線的后段也不例外。一個處理隨機裝載的機器人碼垛機需要特殊的軟件,通過軟件,機器人碼垛機與生產線的其他部分相連接, 這是個巨大的進步。
難以解決的行業難題
1堆垛爪問題
堆垛機器人在不同任務下工作的能力主要取決于機器人法蘭夾具的設計。機器人抓爪的質量和性能直接影響工業搬運機器人的工作質量和效率。傳統裝卸機器人的抓爪由純機械零件組成,結構復雜,整體笨重,移動速度慢,缺乏自動檢測功能,位置控制能力差,控制精度低,以及由于機械手的影響而導致運動不足等問題。工作環境溫度和工件重量。 ,它會影響裝卸機器人的正常工作效率,并且在生產中存在安全隱患。僅當具有抓爪的特定工業機器人設計用于不同的物品時,它們才能運行。但是,面對工業制造,同一工作站上可能會出現多個產品規格。在這種情況下,機器人只能特定地抓握,而不能滿足各種抓握。因此,機器人夾具的選擇和設計非常重要。鑒于這種情況,迫切需要設計一種自適應多功能機器人抓爪。
2自動識別爬網問題
在工業機器人進行碼垛和分揀的過程中,由于產品種類的多樣性,有必要根據物品的種類進行分揀,揀選和碼垛,并將同一條裝配線上的物品運輸到不同的貨盤。其次,在轉移過程中待抓取物品的位置可能不固定,這需要機器人能夠自主識別物品抓取點的位置。因此,選擇性識別和抓握對于碼垛機器人的應用非常重要。
3運動路徑規劃
在工業機器人的碼垛應用中,每單位時間的碼垛次數是衡量工業機器人性能的非常重要的指標。特別是對于高通量生產線,工業機器人的碼垛率決定了整個生產線的產能。影響機器人碼垛效率的因素很多,例如伺服電機的性能,負載強度,機器人的機械結構等,尤其是機器人將物品碼成不同的碼盤類型,碼垛的順序是也是碼垛效率因素的關鍵。當碼垛順序固定后,機器人運動路徑的優化將大大提高效率。如果將機器人運輸到相同的終點,則機器人的路徑選擇會有所不同,機器人的運動解結果會非常不同,最終速度差也會很大。因此,機器人運動路徑和堆疊順序的設計在提高機器人工作效率方面起著關鍵作用。
作品創新點
1.智能化
在科技的不斷發展下,碼垛機器人正在從自動化向智能化方向邁進,智能化所要求的是實現操作人員與設備之間的有效結合,即人機一體,當前碼垛機器人的人機交互能力還遠不足夠,隨著行業的現代化改造進程加快,智能化要求已被提上日程。
2.集成化。
近年來,由于多品種、小批量商品市場的不斷壯大,以及中、小型用戶的急劇增加,人們對多功能通用碼垛機器人的需求越來越旺盛,而要實現多種功能的集成,或者讓機器人滿足不同物品的要求,就需要碼垛機器人向著模塊化、集成化的方向發展。
3.環保化。
一方面我國出臺了眾多環保政策,國家對行業發展中的環保問題日益關注,另一方面,碼垛機器人所應用的工業制造業由于對生態環境影響比較大,一直是環保重災區。兩方面原因的結合,讓不少企業意識到碼垛機器人要承擔起行業的環保重責,未來技術的環保化趨勢已不可逆。