作品名稱:水下機器人
學校名稱:武漢東湖學院
參賽隊伍:譽英
參賽學生:劉陽禹 石森杰 楊袁博聞
指導老師:張榮
社會背景
現如今水下機器人是工作于水下的極限作業機器人,能潛入水中代替人完成某些操作,又稱潛水器。水下機器人主要運用在海上救援,水下環境惡劣危險,人的潛水深度有限,所以水下機器人已成為開發海洋的重要工具。在軍事斗爭中,隨著無人地面戰車、無人飛機和無人艦艇等逐漸在戰場上顯示出越來越高的作戰效能, 無人化作戰平臺將在未來現代化戰爭中發揮重要的作用。
同時,據行業調查分析,2020年我國水下機器人市場總值約為580.65億元,其中資源勘查類、安全檢測類、搜索救援類以及商業應用的市場規模位列前四,分別為241.5億元、194.3億元、68.3億元、63億元。我國近年不斷加大水下機器人研發投入,已成為全球水下機器人產量最多的國家;銷量也位列前茅,占據全球25%以上市場份額。在發展智慧海洋的戰略助推下,我國對水下機器人的需求仍將擴大,預計至2025年還有2-3倍的增長空間,市場潛力正在不斷釋放,未來前景廣闊。
然而我們的團隊通過問卷調查,企業走訪,網絡相關資料查詢等方式。發現了一系列多軸水下機器人面臨的行業難題與痛點。
解決方案的思考
(一)智能水下機器人的智能控制技術
智能控制技術是為了提高智能水下機器人的自主性,在復雜的海洋環境中完成各種任務,因此研究智能水下機器人控制系統的軟件系統、硬件系統和控制技術具有十分重要的意義。 智能控制技術的體系結構是人工智能技術與各種控制技術的集成,相當于人腦和神經系統。
軟件系統是智能水下機器人的整體集成和系統調度,直接影響水下機器人的智能水平。 它涉及到基本模塊的選擇、模塊之間的關系、數據(信息)與控制流、通信接口協議、全局信息資源管理和總體調度機制。
該體系結構的目標應與水下機器人的研究任務相一致,是提高水下機器人智能水平(自主性和適應性)的關鍵技術之一。 不斷完善和完善系統結構,增強對未來的預測能力,提高系統的前瞻性和自主學習能力。
(二)水下機器人的導航技術和通訊技術
水下導航(定位)技術:
對于智能水下機器人導航系統,如慣性導航系統、重力導航系統、海底地形導航系統、地磁場導航系統、重力導航系統、長基線、短基線和光纖陀螺儀、多普勒計計算系統,由于價格和技術,光纖陀螺儀和多普勒計計算系統一般從價格、規模和精度都能滿足水下機器人的要求,加大了國內外的努力。
通訊技術 :
為了能夠有效的監測、傳輸信息數據、協調和回收等,水下機器人發展需要通過通訊。目前的通訊技術方式方法主要有光纖通訊、水聲通訊。
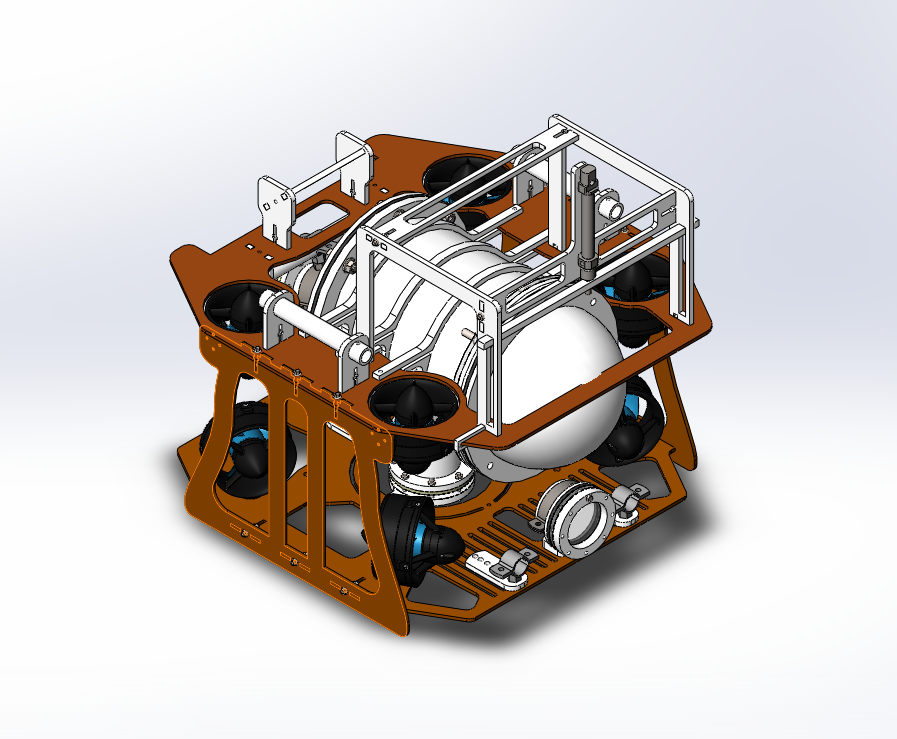
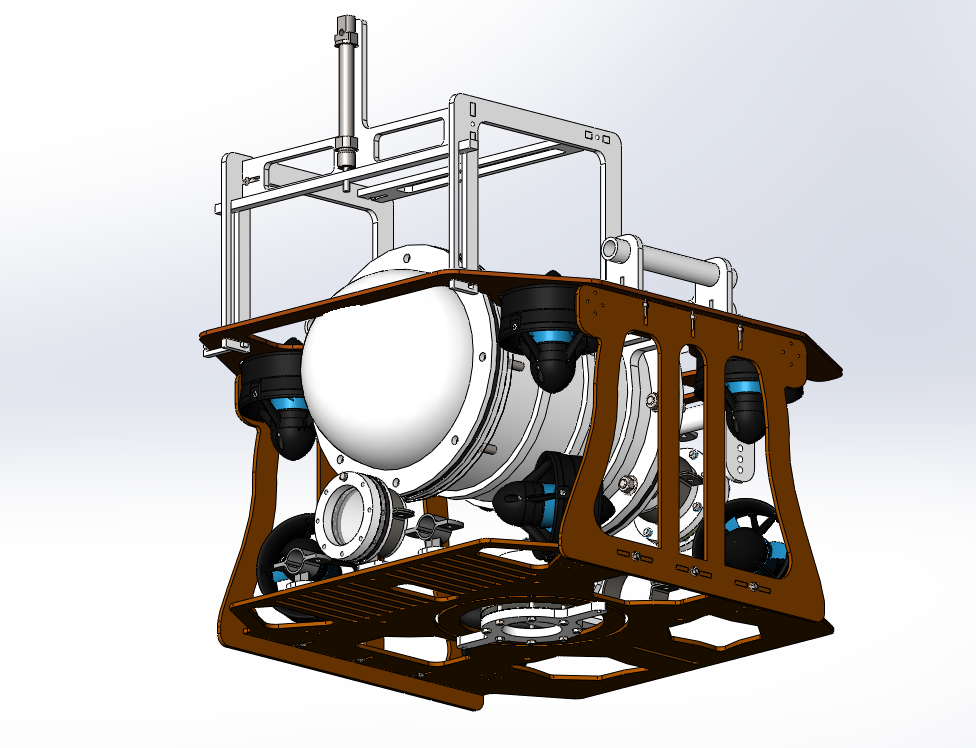
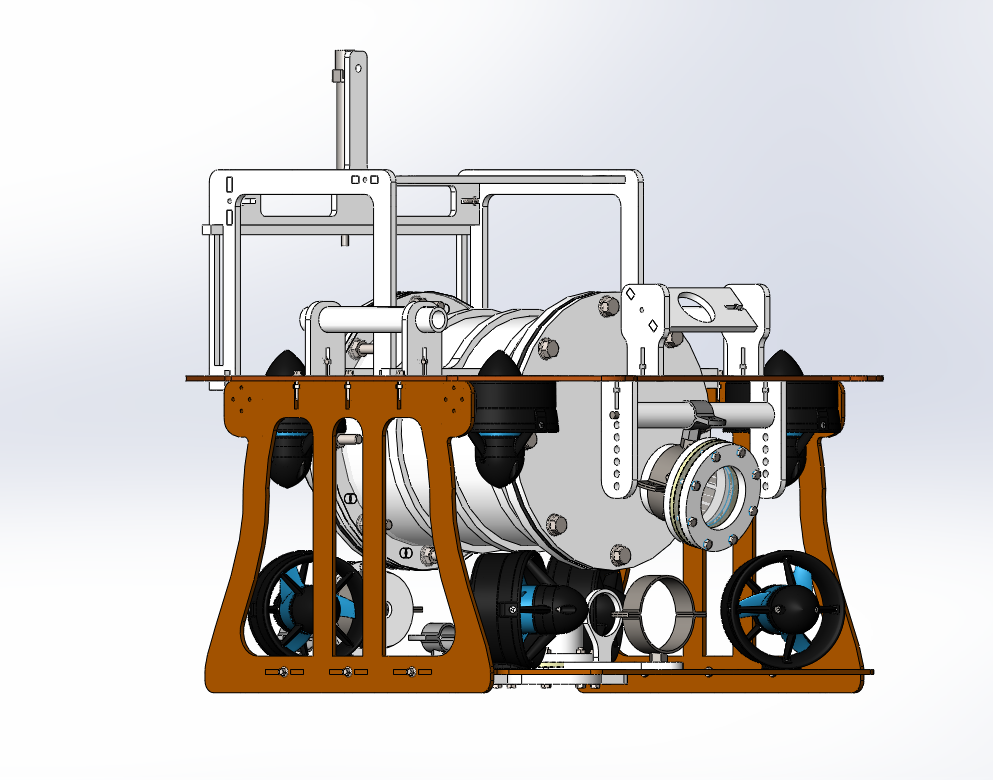
作品簡介
本項目作為一個水下機器人、水下水下機器人平臺,構建出一種采用軸控制,搭載動力單元冗余系統,同時具有機臂自動折疊功能的創新機構。此軸系統相比傳統的水下機器人、水下水下機器人續航時間更長,同時具有更高的的安全性能。此外,本水下機器具備機臂自動折疊系統,在不工作時可自動折疊,節約收納空間。以上優勢可應用于眾多領域例如:資源勘查類、安全檢測類、搜索救援類等方面。為未來的水下器材設計提出了一種新的方案,獨特的創新性在未來具有較大的開發價值。