大賽作品詳情

作品名稱:聯軸器智能組裝及循環生產線
學校名稱:煙臺大學
參賽隊伍:攀達
參賽學生:李齊欣 李昂 劉嗣睿
指導老師:劉桂濤
詳細說明
一、產品簡介
我們團隊設計聯軸器裝配線期望實現聯軸器的全自動組裝,目前只針對彈性體為四瓣的梅花聯軸器進行組裝。也可根據企業需求進行調節,組裝不同型號的聯軸器,彌補國內聯軸器自動組裝的空白。
本產品的工作流程如下所示。首先金屬爪盤、梅花彈性體由供料單元自動取料后,通過機械手、同步帶先后由轉運單元進入檢測組裝單元,梅花聯軸器的三個部分在檢測組裝單元依次通過視覺傳感器進行初步組裝。隨后進入加工單元,初步組裝好的梅花聯軸器通過四軸機器人進行自動鎖螺絲工序。最后經由進入運輸存儲單元,實現物料的循環搬運。
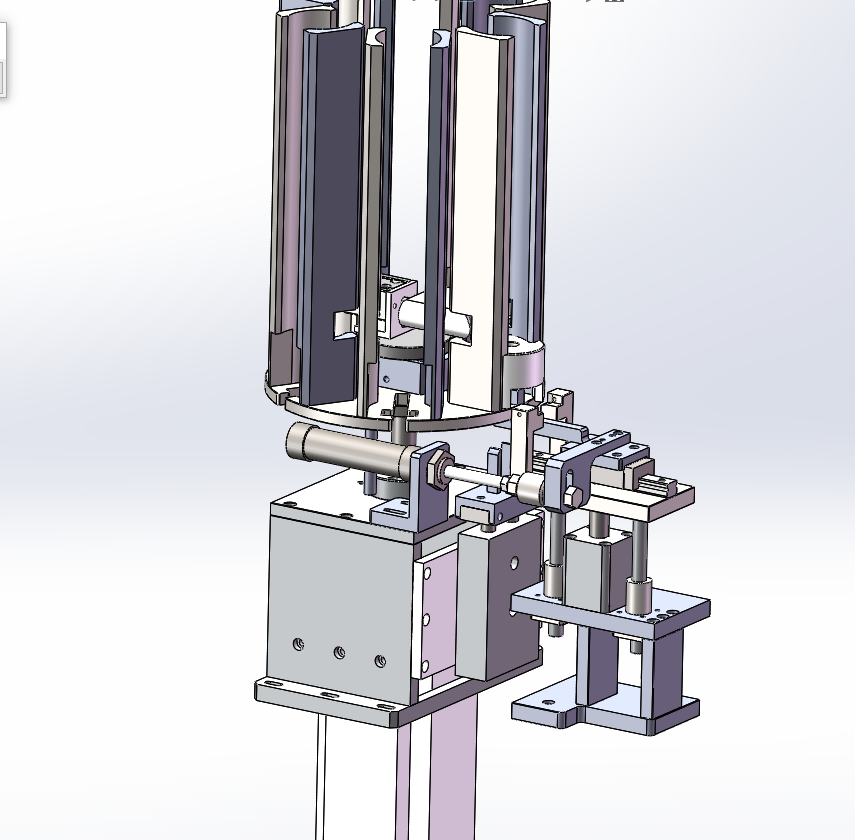
二、供料單元
 (檢測組裝單元)
(檢測組裝單元)
五、加工單元
二、供料單元
首先防反銷將金屬爪盤轉動至圖中相應位置,接近傳感器檢測到金屬爪盤后,迷你氣缸驅動推料塊,將金屬爪盤推出,至此聯軸器一端的金屬爪盤下料完成。
 (轉運單元圖)
(轉運單元圖)
仿形塊將其他金屬爪盤頂住,推料塊收縮回原位置后后面的金屬爪盤由于重力作用下落,等待再次被推出。隨后防反銷將梅花彈性體轉動至相同位置,重復金屬爪盤下料步驟。
在定位銷側安裝有接近傳感器,其目的是檢測料筒中的余料,以控制電機旋轉,在六個料筒中的料全部用完之后,提醒工人上料。
(供料單元圖)
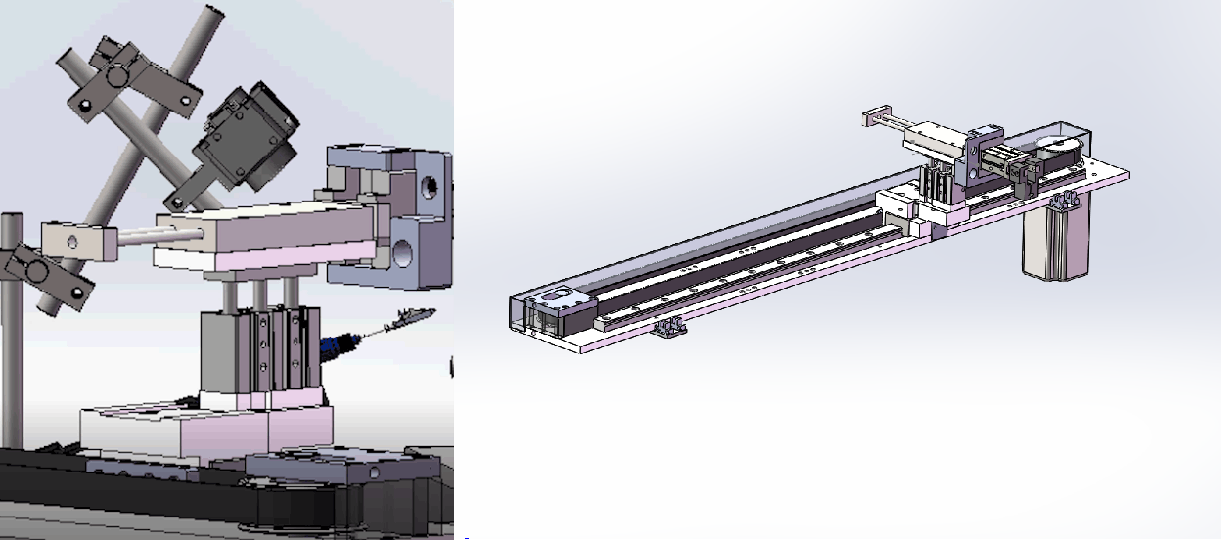
二、轉運單元
二、轉運單元
三軸氣缸、雙軸氣缸、氣動手指、直線導軌與同步帶實現取料機械手在x軸、y軸、z軸方向移動,安裝在同步帶安裝板上的取料感應器限制取料機械手的運動范圍,由此實現取料機械手將物料由供料單元至檢測組裝單元的成功轉運。
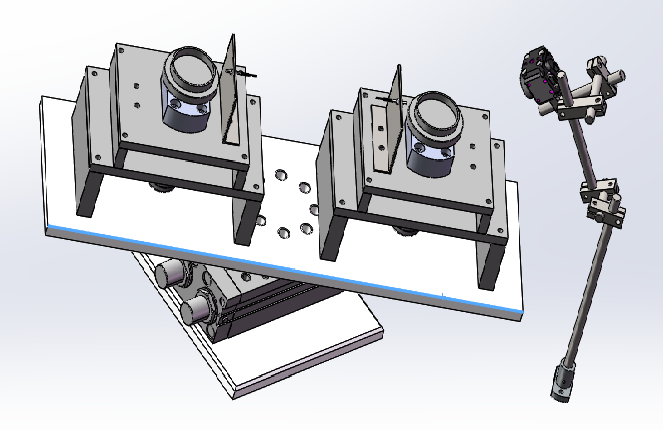
四、檢測組裝單元
右側機械手將聯軸器一端金屬爪盤(凹凸面向上)放置在載物臺的固定裝置中,左側機械爪夾持著梅花彈性體伸至載物臺中央,載物臺上方的視覺傳感器將梅花彈性體形態拍照傳遞信息至控制器。
控制器控制載物臺下方的伺服電機帶動金屬爪盤旋轉至能夠配合梅花彈性體的角度,左側機械爪將梅花彈性體放置在金屬爪盤上,機械爪下壓(通過壓力傳感器控制),將梅花彈性體與金屬爪盤組裝牢固。
左側金屬爪盤取聯軸器另一端金屬爪盤(凹凸面向下),重復放置梅花彈性體時的工作步驟。至此,一個聯軸器的檢測組裝初步完成。
載物臺通過下方的氣缸旋轉180°,帶動聯軸器進入加工單元,檢測組裝單元全部完成。
五、加工單元
聯軸器進入加工單元后,視覺傳感器工作,控制伺服電機帶動上方聯軸器旋轉至四軸機器人可工作的位置,四軸機器人首先鎖付聯軸器上方螺絲,然后載物平臺在伺服電機的控制下旋轉90°,四軸機器人鎖付聯軸器下方螺絲,至此整個聯軸器組裝完成。
(加工單元圖)
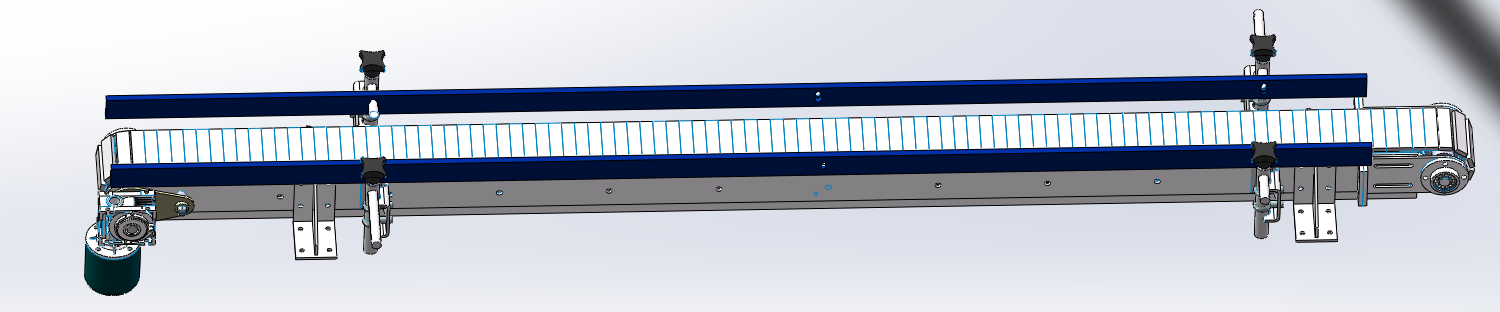
六、運輸存儲單元
板鏈輸送機以標準鏈板為承載面,以直流減速機為動力傳動,實現聯軸器的傳送,其上的對射光纖可實現計數功能,也可防止聯軸器重疊放置,避免運輸過程中因聯軸器傾倒滾動影響工作效率。