

作品名稱:開拓者實訓臺
學校名稱:私立華聯學院
參賽隊伍:從容應
參賽學生:何嘉豪 李世奇 劉軍
指導老師:黃欽強 梁英杰
開拓者實訓臺
一、研究現狀
近幾年來,隨著自動化工業的不斷發展,機械手也將隨之壯大起來.在未來幾年里它的發展趨勢如下:
1.工業機械手性能不斷提高,并體現在高速度、高精度、高可靠性、便于操作和維修。
2.機械結構向模塊化、可重構化發展。例如關節模塊中的伺服電機、減速機、檢測系統三位一體化:由關節模塊、連桿模塊用重組方式構造機械手整機。在國外已有模塊化裝配機械手產品問市。
3.工業機械手控制系統向基于PC機的開放型控制器方向發展,便于標準化、網絡化。器件集成度提高,控制柜日見小巧,且采用模塊化結構:大大提高了系統的可靠性、易操作性和可維修性。
4.傳感器作用日益重要,除采用傳統的位置、速度、加速度等傳感器外,裝配、焊接機械手還應用了視覺、力覺等傳感器,而遙控機械手則采用視覺、聲覺、力覺、觸覺等多傳感器的融合技術來進行環境建模及決策控制;多傳感器融合配置技術在產品化系統中已有成熟應用。
6.當代遙控機械手系統的發展特點不是追求全自治系統,而是致力于操作者與機械手的人機交互控制,即遙控加局部自主系統構成完整的監控遙控操作系統,使智能機械手走出實驗室進入實用化階段,產生生產價值。
國內前景:
那么中國作為制造業大國,要實現制造業自動化必然缺不了機械手的應用,機械手市場前景實為廣闊,為工業的制造生產帶來變化的不僅僅是機械手使用的現代化生產技術,而且隨之而來的現代化管理模式也會大大改變企業的生機和活力和市場競爭力。機械手的應用對于企業調整產業結構,轉型升級,是一個十分良好的契機。
二、創意描述
現代化工業的突飛猛進,作為先進機器人的技術,更是受到各大企業的青睞,機器人不僅可以解決用工荒,替代人工,還可以降低生產成本。由技術更新而隨之而來的現代化管理模式也會大大改變企業的生機和活力和市場競爭力。機械手的應用對于企業調整產業結構,轉型升級,是一個十分良好的契機。
而中國作為一個制造業大國,機器人也是中國制造“2025”的重要組成部分,要實現國家制造業自動化必然缺不了機械手的應用,機械手市場前景十分廣闊。
而該設備集 PLC 及機器人技術于一身,不僅滿足了機器人及 PLC 的訓練要求,還為機器人提供多個實例進行實訓,此實訓平臺能有效解決培養機器人技術人才的問題,通過一臺設備多種訓練功能,模擬車間作業。達到實訓的效果,具有針對性強、結構化等特點,是培養人才的最佳設備。
三、組成部分
開拓者實訓臺的總體是由機械手模塊和周圍模塊組成,其中:
機械手模塊由機械手控制柜、機械手機身、夾具、示教器等部分組成。
周邊模塊由機架、檢測模塊、自動分揀模塊、碼垛模塊、視覺系統、控制盒、氣源處理模塊、控制面板及編程軌跡練習平臺組成.
二、產品簡介

開拓者實訓臺機械結構總成圖
(一)自動分揀系統的結構和工作原理
結構:
自動分揀系統由三大部分組成:送料模塊和輸送帶模塊和支撐部分。
送料模塊包括了推料氣缸、井式送料裝置,輸送裝置包括了輸送帶、直流電機。
工作原理:
推料氣缸推動工件至輸送帶,輸送帶在直流電機的作用下運動,并將工件經輸送帶輸送至裝夾區,工件輸送至裝夾區(輸送帶盡頭攔截位)并被紅外線感應器感應到時,發出輸送帶停止信號和機械手裝夾信號,輸送帶因輸送帶停止信號停止運動,機械手則因裝夾信號移動至裝夾區將工件裝夾移動。 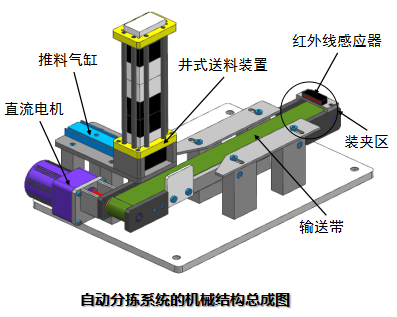
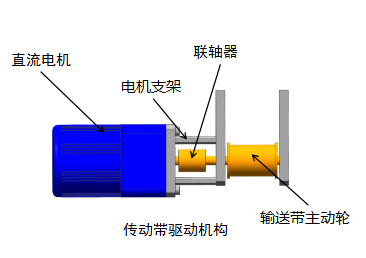
(二)自動分揀系統輸送裝置的驅動機構工作過程和結構
傳動帶驅動機構如圖所示。采用的直流電機,用于拖動傳送帶從而輸送物料。它主要由電機支架、電動機、聯軸器等組成。
工作原理:
直流電機是傳動機構的主要部分,其作用是電機主軸轉動帶動傳送帶運動從而輸送物料,電機支架用于固定電動機,聯軸器由于把電動機的軸和輸送帶主動輪的軸聯接起來,從而組成一個傳動機構。
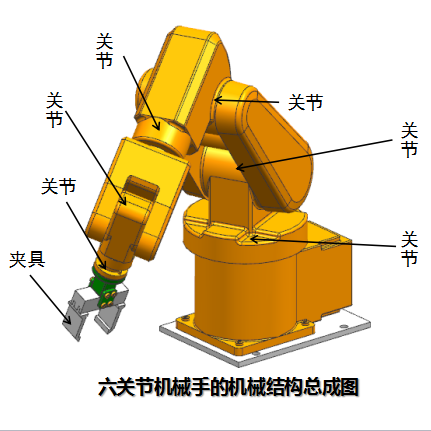
(三)機械手系統的工作過程和結構
機械手系統是多功能機器人實訓操作臺的一個不可缺少的重要組成部分,機械手系統由機械手控制柜、機械手機身、夾具、示教器等部分組成。通過示教器和PLC編程定位,然后完成抓取和放下工件的功能。
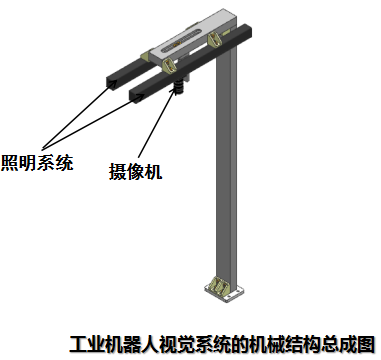
(四)視覺系統的結構和工作原理
工作原理:
視覺系統就是利用機器代替人眼來作各種測量和判斷。攝像機探測到物體已經接近視野中心時向圖像采集部分發送信號。圖像采集部分按照事先設定的程序,分別向攝像機和照明系統發出信號。燈光的開啟時間應該與攝像機的曝光時間同步。攝像機曝光后,正式開始一幀圖像的掃描和輸出。圖像采集部分接收模擬視頻信號并將其數字化,并對數字化圖像進行處理、分析、識別,獲得測量結果。通過處理結果控制流水線的動作、進行定位、糾正運動的誤差等。
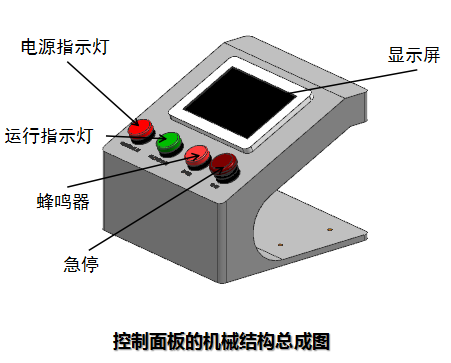
(五)控制面板的結構和工作原理
工作原理:
在開拓者實訓臺的PLC控制盒中通過輸出按鍵編碼信號,以實現各個按鍵的功能,同時PLC控制盒輸出相應指示燈的編碼信號輸入指示燈處理電路,從而實現按鍵指示燈的實時顯示。同時PLC控制盒將程序編碼輸入顯示屏處理電路將程序編碼顯示至顯示屏。
(六)示教器的結構和工作原理
工作原理:
通過操作人員導引機器人,一步步按實際任務操作一遍,機器人在導引過程中自動記憶示教的每個動作的位置、姿態、運動參數等,并自動生成一個連續執行全部操作的程序。完成示教后,只需給機器人一個起動命令,機器人將精確地按示教動作,一步步完成全部操作。

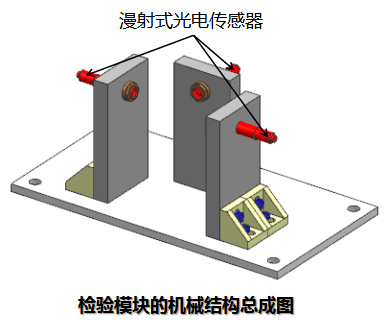
(七)檢驗模塊的結構和工作原理
工作原理:
機械手將工件移動至檢驗模塊,通過漫射式光電傳感器檢測工件特性,利用物體對近紅外線光束的反射原理,由同步回路感應反射回來的光的強弱而檢測物體的存在與否,光電傳感器首先發出紅外線光束到達或透過物體或鏡面對紅外線光束進行反射,光電傳感器接收反射回來的光束,根據反射光束的強弱判斷物體的存在、顏色、大小、形狀等。
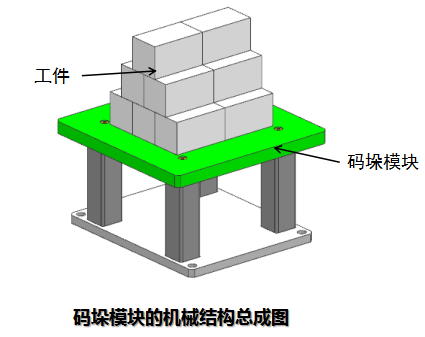
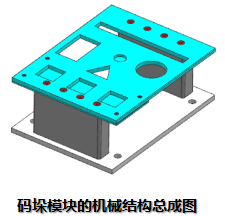
(八)碼垛模塊的結構和工作原理
機械手將工件移動碼垛模塊進行碼垛。
 (九)編程軌跡練習平臺的結構和工作原理通過給定特定的幾何形狀,用機械手沿幾何形狀進行運動編程。
(九)編程軌跡練習平臺的結構和工作原理通過給定特定的幾何形狀,用機械手沿幾何形狀進行運動編程。
五、性能特點
1、結構化的設計,多模塊化,易于維修。
2、一臺設備可以實現多種訓練功能,從而達到減少實訓成本得目的。
3、突出高新技能及自動化特點,讓學生身臨其境,體驗工廠氛圍。
4、針對式訓練特點,讓學生可以發現不足,改進缺點,達到專業能力平衡發展。
通過多個模塊結合或單一模塊可實現的實訓內容有:
1、機器人的認知入門及簡單操作訓練;
2、機器人碼垛、搬運訓練;
3、機器人軌跡訓練;
4、機器人 TCP 訓練;
5、機器人控制接線訓練;
6、PLC 編程訓練;
7、傳感器的認知與了解訓練;
8、傳感器的應用訓練;
9、氣動元件的原理及應用訓練。
六、注意事項
(1)機器人與設備的碰撞,機器人在運行過程中與設備的碰撞,如果機器人與設備運行不協調就會造成機械碰撞,容易造成機器損壞;
(2)示教器的損壞,示教器作為機器人的獨立一部分,人員在操作時如果位置沒有擺放好,容易造成示教器摔壞或破損;
(3)機器人對周圍人員的人身安全的隱患,如果操作不當,容易對周圍人造成人身的傷害,特別是頭部等部位;
(4)機器人夾具的安全隱患,機器人夾具由金屬、氣動元件等組裝而成,操作時千萬不能把手等伸到夾具中去操作,這樣會容易造成機械、氣動元件在動作過程中造成傷害;
(5)操作過程中應防止在設備周圍打鬧等,防止碰撞設備造成人員人身安全;
(6)實訓 TCP 時的安全隱患,由于 TCP 材料比較尖,實訓時防止傷到自身或周圍等人員;防止用手、眼睛等去觸摸頂尖;
(7)設備的用電安全,設備上有高壓電與低壓電,防止設備元件上高壓電與低壓電搞錯互換,接錯線等引起的安全事故;
(8)防止觸電安全;
(9)防止設備回潮或是不慎把水滴到設備上而引起的短路,若有此類事情,應使設備干燥后再啟動;
七、創意描述
現代化工業的突飛猛進,作為先進機器人的技術,更是受到各大企業的青睞,機器人不僅可以解決用工荒,替代人工,還可以降低生產成本。由技術更新而隨之而來的現代化管理模式也會大大改變企業的生機和活力和市場競爭力。機械手的應用對于企業調整產業結構,轉型升級,是一個十分良好的契機。
而中國作為一個制造業大國,機器人也是中國制造“2025”的重要組成部分,要實現國家制造業自動化必然缺不了機械手的應用,機械手市場前景十分廣闊。
而該設備集 PLC 及機器人技術于一身,不僅滿足了機器人及 PLC 的訓練要求,還為機器人提供多個實例進行實訓,此實訓平臺能有效解決培養機器人技術人才的問題,通過一臺設備多種訓練功能,模擬車間作業。達到實訓的效果,具有針對性強、結構化等特點,是培養人才的最佳設備。

