

作品名稱:精準農業——馬鈴薯智能精準定距播種機
學校名稱:山東理工大學
參賽隊伍:NY創客
參賽學生:張慶典 劉金雨 王凱璐
指導老師:魏忠彩
一、產品介紹
嵌入式四孔固定的方式接于履帶式或輪式拖拉機后方,根據于雨天和干旱等多種地區天氣氣候改變耕作播種方式,通過鏈傳動軸傳動系統帶動播種裝置輸送帶轉動以實現薯種的取種和投種;與拖拉機油路相連的液壓馬達將動力傳遞至偏心輪和連接盤所組成的偏心機構,實現偏心機構轉動,偏心機構分別帶動控制馬鈴薯塊傳輸裝置中主動滾的轉動,從而帶動整個傳輸皮帶的運行,使馬鈴薯種塊進入播種通道。雙列單排排序輸送投種機構的擺動板、振動回種機構的振動板和落種調節裝置的調節板,實現其各自的循環往復振動。
馬鈴薯種塊或微型薯播種作業時,播種機在拖拉機驅動下,帶動地輪轉動,通過鏈-齒輪傳動系統,將動力傳遞至播種裝置的輸送帶。同時,播種裝置的振動板和擺動板的高頻低幅往復振動,以及落種調節裝置調節板上下往復周期性運動的動力,均分別由液壓馬達控制;且液壓馬達通過節流閥調節其動力輸出軸的轉速。馬鈴薯種塊從種箱落至振動排序播種裝置的集種口處,在振動板作用下,由于薯種的流動性,馬鈴薯種塊從振動板運動至擺動板和輸送帶(外表面右側邊緣設置護種凸起)所構成的導種通道并向后輸送,在振動板帶動主動滾震動復合往復擺動并在擺動板與輸送帶外表面的盛薯碗振動,以使盛薯碗中多余的種塊通過振動落入第一次集薯裝置,保證雙列盛薯碗與馬鈴薯種塊單一對應;同時,輸送帶上還是會存在多余的、空的馬鈴盛薯碗,這時,二次給薯裝置收集通過播種振動裝置產生的多余薯塊傳輸于馬鈴薯盛薯碗,排除空碗可能。雙列排序的馬鈴薯種塊在輸送帶的振動輸送下運動至隔網、排種架護板、輸送帶傾斜段的上層帶與壓種帶的下層帶共同構成的落種通道。此時,與輸送帶帶速相同的壓種帶對薯種進行壓種定位,并在輸送帶和壓種帶共同壓種、定位、輸送作用下將薯種送至落種口,最終薯種因失去支持力而投落至種溝內。最終,通過覆土起壟裝置將種溝內的種薯覆土和起壟,完成整個播種作業。此外,落種調節裝置在液壓馬達驅動下,與種箱落種口形成動態種口,以避免薯種結拱; 根據薯種粒徑,通過轉動種量調節單元的手柄,升降調節板,改變落種口的尺寸,以滿足播種裝置所需的落種量。
二、工作原理
雙列交錯勺帶式馬鈴薯精量排種器工作原理如圖所示,其工作過程主要分為充種、運移、清種、導種和投種 5 個串聯階段。正常作業時,馬鈴薯種薯在重力作用下填充至種箱充種區內,通過充種箱體自身物料防架空限位結構控制種薯流動狀態,避免出現種薯結拱現象,通過充種箱體頂部橡膠翻蓋控制種薯數量,保證充種區內種薯動態平衡。動力由機具行走輪通過鏈傳動傳至主動帶輪,進而驅動柔性排種帶與取種凹勺整體自下而上平穩運移。馬鈴薯種薯在取種凹勺旋轉攪動作用下進行分種,形成速度不等的種薯層,在種薯自身重力、種薯間碰撞摩擦作用力及取種凹勺作用力共同作用下進行取種作業,完成充種環節。當取種凹勺攜帶種薯運移至清種區時,通過行走機具配套的直流電機驅動可調式振動凸輪系統進行規則旋轉間歇振動,配合防夾帶分流頂桿清除勺內及勺間夾帶種薯,保證單粒取種,完成清種環節。當取種凹勺舀取單粒種薯越過主動帶輪最高點時,在取種凹勺作用力及自身重力作用下落入前一取種凹勺背部,且相鄰取種凹勺與導種護罩間形成封閉空間,進行平穩導種環節。種薯被運移至投種點拋送瞬間由于離心力突變進行零速投種,從而完成投種環節。雙列交錯勺帶式精量排種器關鍵部件優化設計與分析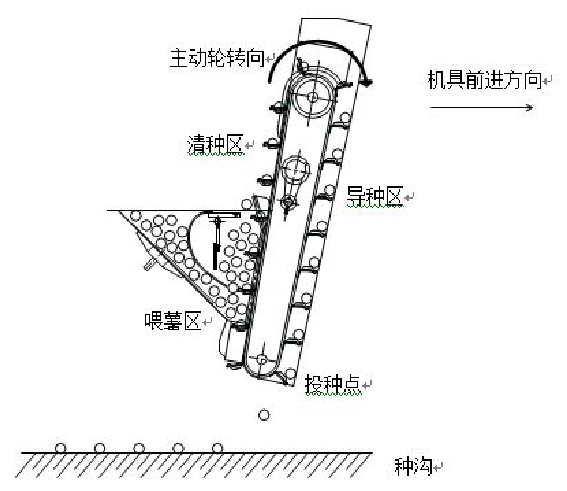
排種器工作原理


