

作品名稱:一種栽種植樹裝置
學校名稱:湖北文理學院理工學院
參賽隊伍:漂
參賽學生:梅小云 劉洋成
指導老師:夏慶國
一種栽種植物裝樹裝置簡介
設計說明
目前在市面上關于栽種機器人并沒有成型的技術方案,而現有的栽種工具都需要人工實時操作,并且栽種植物單一,栽種效率低,為了能夠實現栽種多種植物和提高栽種效率,而設計了本產品,可以在各種環境下實現鉆地打孔栽種各種植物的功能。
圖1裝置運動演示動畫
如圖1,采用三角履帶和平行履帶結合的運動方式,適應各種惡劣環境。
圖2 整體結構展示
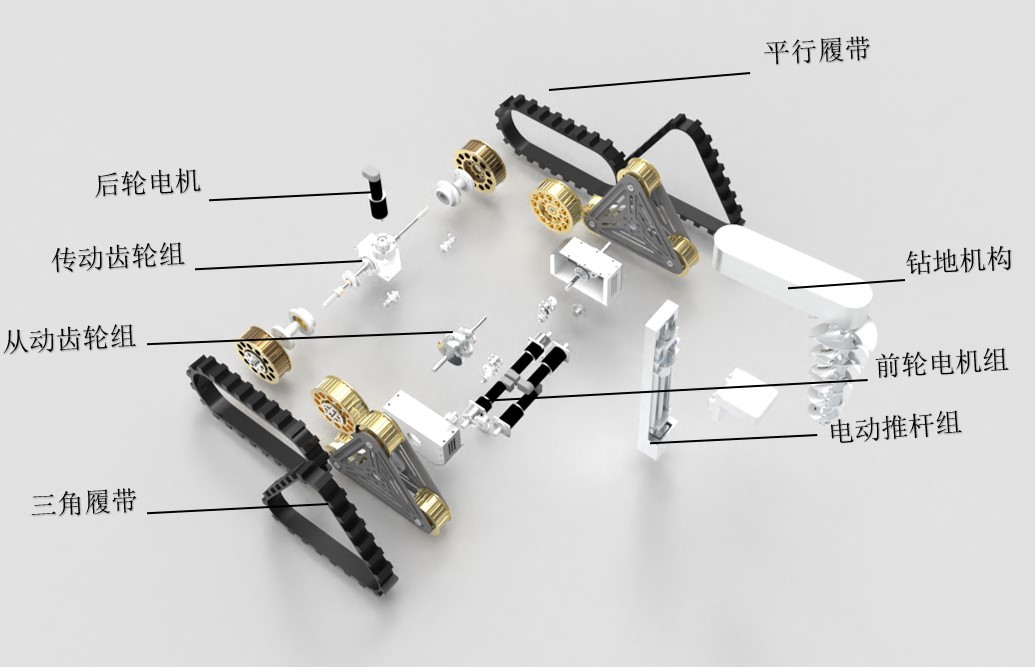
裝置主體由電動推桿組、前輪電機組、鉆地機構、平行履帶、后輪電機、傳動齒輪組、從動齒輪組、三角履帶等零件構成。
圖3栽種結構介紹
圖4鉆地結構介紹
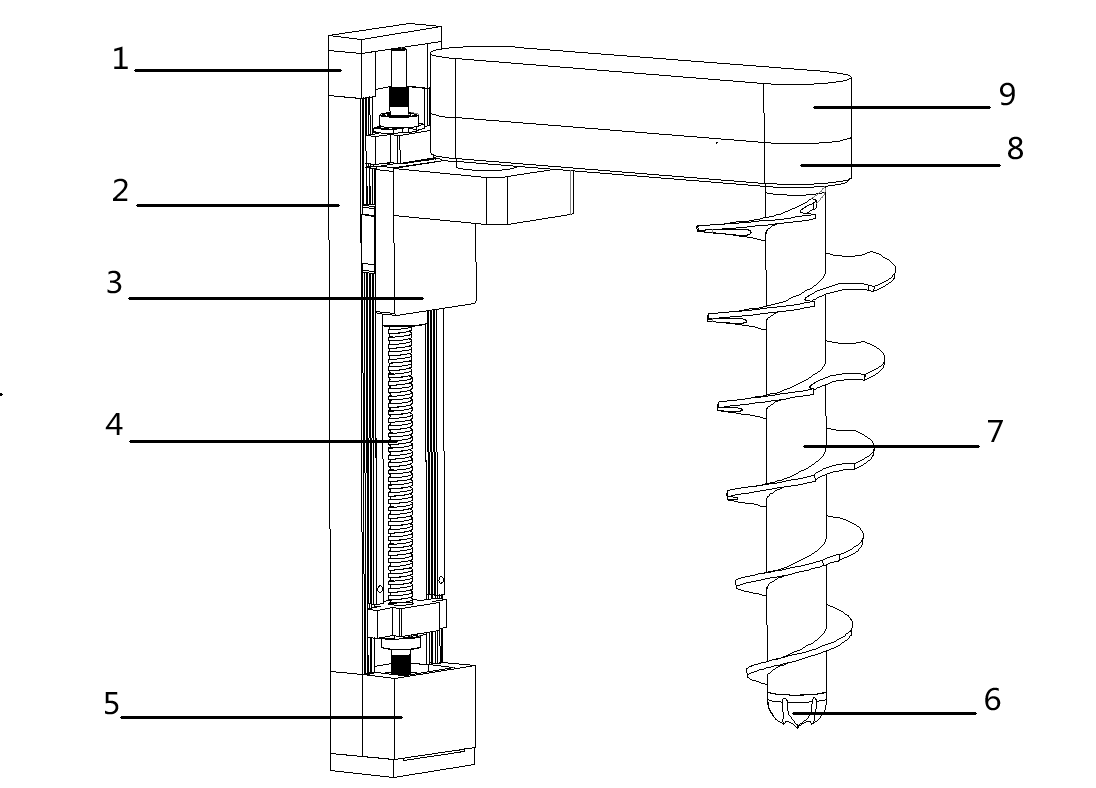
如圖:1.上蓋;2.絲桿套殼;3.滑塊固定平臺;4.絲桿;5.下蓋;6.鉆頭;7.打孔卷刀;8.防塵下殼;9.防塵蓋;10.轉向電機;11.轉向輪。
工作原理簡介
考慮到,栽種環境的不穩定性,采用電機供能及齒輪傳動方式和三角履帶和平行履帶的組合搭配運動方式適應各種惡劣環境的暢通無阻。
鉆地機構采用絲桿和鉆機組合搭配的方式實現鉆地機構自由升降調整鉆地的深度的同時能180度旋轉實現兩側鉆地打孔。當鉆地機構打好兩側的栽植孔之后,裝置前進到合適位置由栽種輪盤旋轉投擲需要栽種的植物。
栽種輪盤采用雙層輪盤式結構儲量24棵植物,下層植物栽種完之后上層轉動通過傳送孔將上層植物投擲給下一層,一次栽種兩棵植物。
裝置設有碰撞識別裝置,裝置自帶防跌和紅外線感應裝置來躲避障礙物,采用拓撲算法結合GPS厘米級導航擇優選擇栽種路線。
引入互聯網+控制裝置,不僅可以遠程操控裝置實時知道栽種狀態,并且采用待機及時即用的使用模式。裝置內部設有人工智能語言助手,在裝置不工作時裝置處于待機狀態,人工智能語言助手可與人進行簡單的交互。
手機控制裝置的頁面如下圖:
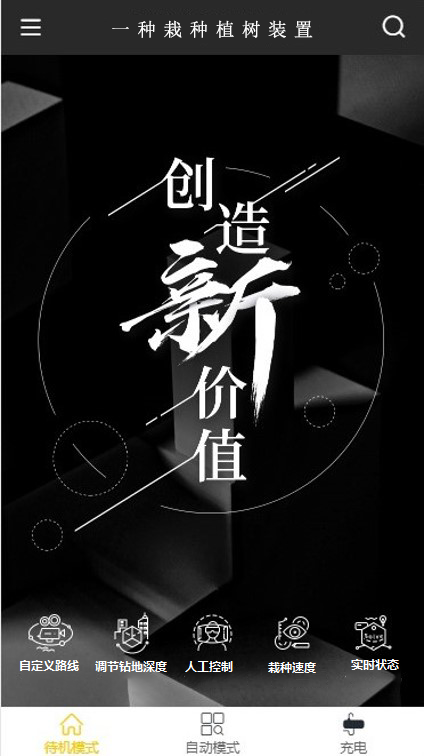
進入控制頁面可選自動模式,進入控制頁面可選自動模式,進入自動模式后。裝置將進行默認的栽種路線、鉆地深度和栽種速度進行植物的栽種。
用戶可以裝置遠程操控可自定義栽種路線、鉆地深度、栽種速度,并且能查看裝置的實時狀態。
人工控制:裝置可切換為人工遠程控制。
自定義路線:用戶可從拓撲算法得出的幾種栽種路線進行自由選擇。
調節鉆地深度:用戶可以根據栽種植物的根被長度自由選擇合適的栽種深度,栽種深度調節范圍為10~35cm。
裝置低電量時:軟件界面會提示電量不足,及時充電。
實時狀態:用戶在終端可以查看到裝置的栽種路線及已栽種植物的分布情況。
待機模式,采用待機及時即用的使用模式。裝置內部設有人工智能語言助手,在裝置不工作時裝置處于待機狀態,人工智能語言助手可與人進行簡單的交互。
總結
本設計為團隊原創,其結構緊湊,工作原理簡單具有良好的可靠性。體積小巧,適用于各種環境使用。由于時間緊張許多細節尚未完善,望老師們諒解。如有幸通過初賽我們將奉上更完善的講解視頻。
注:由于設計過程中為方便創造,采用自頂向下設計所以未生成過多獨立零件。


