
作品名稱:四自由度機械手螺絲安裝龍門車床螺絲機
學(xué)校名稱:鹽城工學(xué)院
參賽隊伍:天機可械
參賽學(xué)生:辛云 潘宇 耿彬
指導(dǎo)老師:詹月林 周海
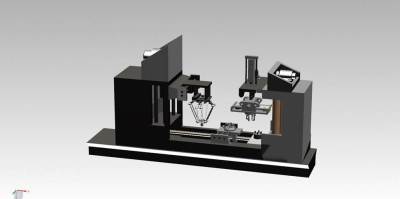
四自由度機械手螺絲安裝龍門車床
研究背景:
隨著工業(yè)2.0的發(fā)展,大型的機械裝配與大量的零件加工需求越來越大。四自由度機械手是一種能模仿人手和臂的某些動作的機器,其用以按固定程序抓取、搬運物件或安裝螺絲,兼有人和機械手機器各自的優(yōu)點。
現(xiàn)有的機械手自由度小,進給量小,難以實現(xiàn)預(yù)期的功能。四自由度機械手螺絲安裝龍門機床自由度大,構(gòu)造和性能上兼有人和機械手機器各自的優(yōu)點。
項目方案
1、項目研究背景
(1)國內(nèi)外的研究現(xiàn)狀及研究意義
自所以本設(shè)備綜合經(jīng)濟性和實用性,采用分部試小型設(shè)備進行檢測,更具性價比優(yōu)勢。
國內(nèi)機械手設(shè)備無人工廠”開始投入建設(shè),這標(biāo)志著當(dāng)?shù)?ldquo;機器換人”戰(zhàn)略進入新階段。自車間的革命起,“機器換人”換出產(chǎn)品效益。機械手應(yīng)“不能簡單地把‘機器換人’看成是解決用工難的辦法,而是工業(yè)制造自動化、精密化、智能化水平提升和產(chǎn)品品質(zhì)提高的體現(xiàn)。”
目前,一套機器手需要18萬元,目前一個工人的年用工成本約6萬元,而在不同工序上“機器換人”的替代率不同,由此可見,在大規(guī)模裝配中機械手的優(yōu)勢極其明顯。
(2)項目已有的基礎(chǔ)
1)項目組同學(xué)已經(jīng)對風(fēng)電葉片的檢測儀器理進行了較充分的探索研究。
2)鹽城工學(xué)院模具智能制造研究院能夠為項目的實施提供基本的設(shè)備和場所。
3)項目小組成員素養(yǎng)良好,具有一定的研發(fā)能力和團隊協(xié)作精神。
(3)與本項目有關(guān)的研究積累和已取得的成績
本項目已經(jīng)熟悉機械手裝置工作原理、機械結(jié)構(gòu)、基本參數(shù),對研究對象進行了建模和仿真。
(4)已具備的條件
有設(shè)計制造的經(jīng)驗,對市場需求有一定的了解。
2、項目研究目標(biāo)及主要內(nèi)容
(1)項目研究目標(biāo)
與傳統(tǒng)機床相比,加工范圍廣,用途強大,是促進產(chǎn)品研發(fā)的必要設(shè)備。
(2)項目研究的主要內(nèi)容
精確化齒輪和絲杠裝置,實現(xiàn)精確定位;增加設(shè)備電機聯(lián)機,提升設(shè)備一體化率;完整展示機械手螺絲機優(yōu)點,實現(xiàn)初步建模;使用大自由度機械手,實現(xiàn)大范圍裝配。
3、研究思路
裝置由電氣和機械部分組成。電氣部分為裝置提供動力,實現(xiàn)電機正反轉(zhuǎn)、調(diào)速,包括總控制平臺、信號采集裝置;機械部分用于實現(xiàn)機械手的運動、測量距離的改變,主要包括絲桿、齒輪組、氣缸等。
4、項目創(chuàng)新特色概述
1)多自由度。使不同的多方向力實現(xiàn)對機械手的多角度加工;
2)專用夾具。使試樣裝夾規(guī)整、受力均勻,減少損傷;
3)自動行進。檢測與夾具設(shè)備距離,自動選擇最優(yōu)行程,保證多點距離的相同;
5、項目研究技術(shù)路線
(1)操作系統(tǒng)
采用LabVIEW程序設(shè)計語言完成測試儀的上位機控制軟件的設(shè)計,實現(xiàn)機電一體化。
(2)動力系統(tǒng)
采用多個電機作為動力源保證整體動力需求。
(3)傳動系統(tǒng)
傳動系統(tǒng)由大小齒輪、大小錐齒輪、絲杠、軸承和直線導(dǎo)軌組成。
(4)推進系統(tǒng)
包括絲杠的進給和液壓缸的推進。


