
作品名稱:智能型水面垃圾清理船
學(xué)校名稱:南通理工學(xué)院
參賽隊伍:水面環(huán)保衛(wèi)士
參賽學(xué)生:李杭 李騫 劉文學(xué)
指導(dǎo)老師:陳玲 孟巧
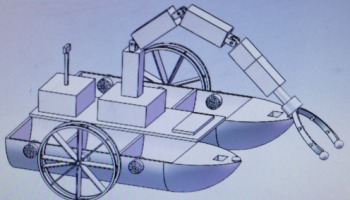
水面垃圾清理的難題日益顯著, 本作品智能型水面垃圾清理分揀船的總目標(biāo)即解決城市河道、景點湖泊等水域水面垃圾處理的難題。本作品以電能為驅(qū)動,研究無人駕駛技術(shù)在水面垃圾清理分揀船上的應(yīng)用主要涉及航線設(shè)計規(guī)劃、智能避讓與導(dǎo)航、自動識別目標(biāo)與智能分揀等主要方面。讓水面垃圾清理分揀船真正實現(xiàn)智能航行,徹底解放人力,提高水面垃圾清理的效率。
現(xiàn)階段所有關(guān)于垃圾清理船的研究與實踐應(yīng)用,都突出了水面垃圾的收集功能,關(guān)于實現(xiàn)水面垃圾的預(yù)分類的功能尚未研究。對于應(yīng)用于城市河道湖泊的水面垃圾清理裝置仍有功能的欠缺,尤其是垃圾的自動分揀與歸類功能,在水面收集垃圾的過程中就完成對垃圾的初步分類毫無疑問是最理想的水面垃圾處理的方式。
本作品的技術(shù)關(guān)鍵在于如何實現(xiàn)船舶的智能航行以及如何實現(xiàn)水面垃圾的智能分揀功能。在基于智能航行的基礎(chǔ)上完成水面垃圾的自動收集與智能分揀、歸類,實現(xiàn)垃圾的預(yù)分類,有效避免污染垃圾與常規(guī)垃圾的交叉污染,大大簡化岸上的工作,是本作品的設(shè)計宗旨。


