
作品名稱:幸運草
學校名稱:山東交通學院
參賽隊伍:幸運草
參賽學生:程增木 申慶賽 魯佳
指導老師:劉新磊 郭榮春
在21世紀的今天,隨著自然災害、突發(fā)事故越來越多,在事故發(fā)生后第一時間救援變得尤為重要。我們的作品是一款具有自主智能的救援機器人,它用于事故發(fā)生后在危險而復雜的環(huán)境中搜尋幸存者,協(xié)助人們完成救援。它的外形的設計靈感來自于機器人總動員中的機器人。它具有復雜的機械結構和精密的的電子器件,并由單片機控制。 |
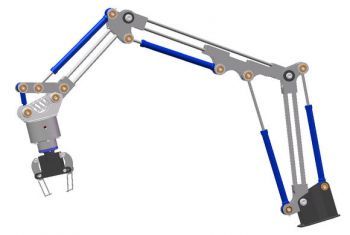
機械部分:由履帶輪、機械爪、機械手臂、傳動機構等組成履帶輪基于平行四邊形機構,便于在不良條件下行駛,機械爪用于抓取進行救援。 電器部分:由攝像頭、測距傳感器、報警傳感器、單片機、控制電路等組成。電路系統(tǒng)在單片機的控制下,由電源電路、尋線電路、避障電路等組成。 |
創(chuàng)新性:提出了一種新型履帶變形機構,該機構巧妙地利用了平行四邊形機構構型變化總長不變的特點,使履帶的運動控制變得非常簡單。同時該作品基于履帶變形機構設計了一種新型機器人移動平臺。 實用性:本設計以AT89S52單片機為核心部件,利用紅外傳感檢測、電機控制等技術,使其可以避開障礙物自動尋路,自動搜集信息,發(fā)現(xiàn)目標。同時該設計外形美觀,造價低廉,具有一定的可行性和穩(wěn)定性。 |


