
大賽作品詳情
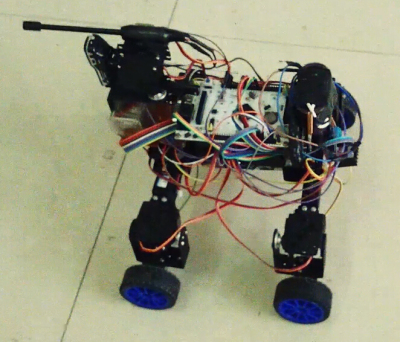
作品名稱:四足輪式機器人
學校名稱:山東航空學院
參賽隊伍:星明科技
參賽學生:孫偉 李鑫磊 施海濱
詳細說明
為使機器人適應各種災區復雜地形,人員無法直接進入的惡劣環境執行搜索、救援、運送物資或者在反恐救援中執行反恐偵察或對目標進行打擊的功能,設計了一構與輪式結構相結合的機器人,四足仿生行進和輪式行進均可使機器人靈活運動,保持高度的靈活性和多地形適應性,機器人攜帶高能電磁炮,可對目標實施物理攻擊種以STM32F103ZET6單片機為主控芯片、電腦上位機無線控制的四足機械結,機器人采用C#語言自主開發的電腦上位機或觸摸屏手持控制端無線控制,操作簡單,安裝方便,信號強度高,穿透能力強。自帶錄像裝置,實時記錄機器人所處環境的視頻資料。結構設計合理,小巧緊湊,負載能力強,可自由出入狹窄空間,執行特種任務。


