
作品名稱:車間多用機械手
學(xué)校名稱:武漢城市學(xué)院
參賽隊伍:逆行時代
參賽學(xué)生:解梟雄 仝偉 姚宇超
指導(dǎo)老師:熊曉松 王薇薇
機械手臂是現(xiàn)代必不可少的代替勞動力提高生產(chǎn)力的機械裝置,運用了自動化,機械視覺傳感器,再加入電腦編程,無限傳感是一個職能性的小機器人。世界各國都在在工業(yè)革命的飛速發(fā)展進行創(chuàng)造更好的機器人,我國為此也提出了工業(yè)2025.
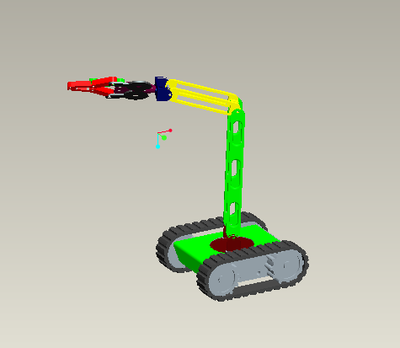
本機械手是為了代替車間工人,減少人員傷害和疲勞(像污染嚴(yán)重,噪聲大的車間,工作條件存在潛在的危險像沖床上送料),為此設(shè)計的車間多用機械手,本機械手利用齒輪傳動來提高其準(zhǔn)確度,由電動機帶動可實現(xiàn)在地面自由移動而且由于是履帶傳動對地面平整的要求較低,通過電動機驅(qū)動,機械手還可以實現(xiàn)360度自由旋轉(zhuǎn),實現(xiàn)選角度拿取和紡織物品,再加上機械視覺傳感器可實現(xiàn)無人車間,車間只需要人工對電腦或遙控器操作,解放勞動力,機械手可以自己識別所需要搬動的零件,此機械手結(jié)構(gòu)簡單,而且對造型美化也進行了設(shè)計,可以節(jié)省制造材料,是一個可以準(zhǔn)確識別,定位,搬動,放置,回位的自動化機械手臂。


