
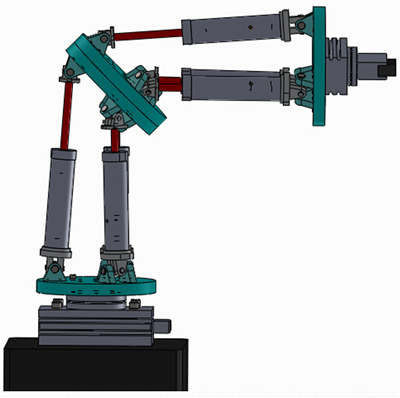
作品名稱:六自由度氣動機械手
學校名稱:巢湖學院
參賽隊伍:飛躍
參賽學生:唐燕翔 張羽 張燚
指導老師:代光輝 張晴晴
人手和臂的運動系統是以骨骼及依附其上的肌肉所組成的骨骼肌肉系統為主、受神經系統控制的運動系統,運動精確靈敏。機械手是一種模仿人體上肢的部分功能,按照預定要求輸送工件或握持工具進行操作的自動化技術設備。隨著科學技術的不斷發展,機械手的研究領域和使用范圍不斷拓廣。尤其符合人手和手臂運動規律的機械手越來越被重視。這種仿生程度高、運動靈活以及可以完成多方位工作要求的機械手,在醫療器械、康復醫療、仿生、智能機器人、軍用武器、航空航天等諸多領域將發揮很大的作用。
現今使用的機械手可分為坐標型機械手和關節型機械手。坐標型機械手是按照三維空間坐標或者極坐標設置運動軌跡的機械手,其缺點是不具備類似骨骼關節的機構,自由度少,運動不夠靈活;關節式機械手設置有大臂、小臂、肘關節和腕關節,具有上肢結構外形,可實現較為簡單的人手操作的機能。但其局限性在于:肘關節和腕關節結構采用轉動裝置,只能實現轉動角度的改變,而不能實現轉動方向的改變,導致其仿生程度降低,機械手的靈活性受限。
本文目的在于克服現有技術的不足,提供了一種新型機械手。


