作品名稱:一種物流搬運機器人
學校名稱:湖北文理學院理工學院
參賽隊伍:牛刀小試對
隊伍編號:206786
參賽學生:王樂樂 王茂勇 溫磊
指導老師:李濤
投票日期:2024年10月08日 00:00->2024年12月05日 15:00
請在微信端進行投票。點此掃描二維碼。
一種智能物流搬運機器人
一、 項目背景和展望
1.1 項目背景
在當今商業環境中,物流行業規模持續擴大且復雜度不斷增加。一方面,電商行業的爆發式增長,海量訂單對物流的處理速度和準確性提出了嚴苛要求。傳統依靠人力搬運貨物的模式,不僅效率低,而且在高強度作業下易出現差錯,難以適應高頻次的物流運轉。制造業也在轉型升級,向智能化、自動化生產邁進。智能工廠內物料的搬運配送需要更高效、精準的解決方案。傳統搬運方式無法滿足生產節拍的加快和物料配送的及時性需求。
同時, 人力成本逐年攀升,企業在物流環節的人力支出成為較大負擔。而且,人口老齡化在一些國家和地區加劇了勞動力短缺問題,特別是物流搬運這種對體力要求較高的崗位。技術層面,自動化技術、人工智能、傳感器技術等取得重大突破。導航技術能讓機器人精準定位和規劃路線,視覺識別技術使機器人可識別貨物與周圍環境,這些都為智能物流搬運機器人的研發和應用創造了條件。在此背景下,智能物流搬運機器人項目應運而生,它將極大地提高物流搬運效率和質量,推動物流行業和制造業智能化發展。
智能物流搬運機器人能顯著提高物流效率,24小時不間斷工作,快速準確地搬運貨物,大大縮短物流周轉時間。可降低人力成本,減少對大量人力搬運的依賴。機器人搬運精準度高,能有效降低貨物損壞率。還能適應復雜危險環境,如高溫、有毒環境,保障人員安全。而且通過系統調度,可優化搬運路徑,提升整體物流運作的智能化水平,讓倉儲空間利用更合理,在電商、制造業等行業廣泛應用能增強企業競爭力。
1.2項目展望
1) 市場增長與需求:從市場現狀來看,電商和快遞行業的業務量呈井噴式增長對貨物搬運和倉儲管理的效率要求極高。智能物流搬運機器人可以在大型倉庫中快速、準確地搬運貨物,有效提高訂單處理速度。同時,制造業也在積極引入該項目,在生產線上實現物料的及時供應,保障生產流程的順暢。
2) 技術創新與應用:當前的智能物流搬運機器人融合了先進的導航技術,如激光導航和視覺導航,能夠在復雜環境中靈活穿梭,精準定位。其機械臂設計更趨完善,可以輕松抓取不同形狀、重量的貨物。并且,借助物聯網和大數據技術,機器人能與整個物流系統無縫對接,實現信息的實時共享和任務的智能分配。
3) 應用場景的拓展和研發投入:在應用場景上,除了傳統的倉庫和工廠,還拓展到了港口等大型物流樞紐。在港口中搬運集裝箱等重物,降低人力勞動強度和安全風險。眾多企業也在加大研發投入,不斷優化機器人性能,提高負載能力、運行速度和續航能力。同時,相關行業標準也在逐步完善,保障機器人在不同場景下安全、穩定地運行,促進智能物流搬運機器人項目更好地發展。
二、 設計方案
2.1 方案設計
1. 采用輪式底盤設計。輪式靈活,能實現快速移動。底盤還配備高性能電機和驅動系統,保障動力和速度。
2. 導航系統采用視覺導航,用攝像頭采集圖像信息,識別標志和路徑;慣性導航用于輔助定位,保障機器人準確運行。
3. 物流搬運機器人通過控制系統驅動卷揚機,卷揚機收放繩索來控制夾子的開合與升降,從而抓取和移動貨物。
4. 貨物承載可以選用托盤、貨架等形式,具體情況可以根據搬運貨物類型設計,確保貨物在搬運過程中的穩定。
5. 控制系統由硬件和軟件組成。硬件包括控制器、傳感器接口等,軟件負責處理傳感器數據、規劃路徑和協調各部分動作。
6. 采用避障傳感器,防止碰撞;重量傳感器,檢測貨物重量;還有姿態傳感器,維持機器人平衡。
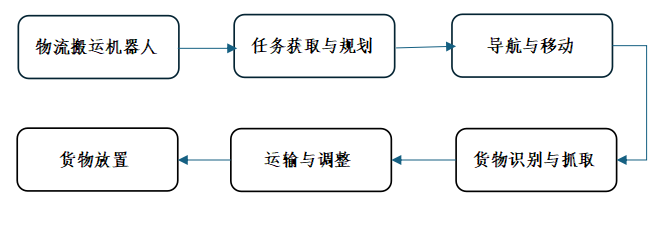
2.2工作過程
智能物流搬運機器人從物流搬運系統接收任務后,導航系統規劃從起始點到目標貨物的路徑。到達貨物處,機械臂根據貨物形狀、重量調整姿態抓取貨物并放置于承載裝置。隨后,按新規劃路徑移動到指定存放或運輸點,放下貨物。過程中傳感器系統實時監測周邊環境、自身姿態和貨物狀態,控制系統協調各部分運作。