

作品名稱:四足仿生機器人外接感應裝置的多維應用
學校名稱:上海中僑職業技術大學
參賽隊伍:智能救援守護人
隊伍編號:208139
參賽學生:周明燦 曹洋陽
指導老師:柳學斌
投票日期:2024年10月08日 00:00->2024年12月05日 15:00
請在微信端進行投票。點此掃描二維碼。
一、項目概述
1.1項目背景
自然災害與火災是世界各國人民所面臨的災難性問題。根據聯合國全球災害數據平臺提供的資料顯示,全球每日發生自然災害與火災2萬起,傷亡數百人。據統計,2020年至2024年,我國發生自然災害與火災案件19.8萬起,死亡人數5.3萬人,直接經濟損失961.3億元。基于近四年的案例數據分析,火災給國家經濟造成了嚴重損失,也給人民群眾的生命財產帶來了巨大損害。事實證明自然災害與火災是當今社會高度敏感且嚴加防范的話題之一。
自1980年美國首次研發出第一代四足仿生機器人以來,盡管經過了將近一個世紀的持續努力,輪式或履帶式車輛在松軟地面上的性能仍未實現根本性的提升。然而,這一長期存在的問題在2016年迎來了轉折點。經過36年的發展,四足機器人技術取得了顯著進步,進入了多模態、多形態的創新時期,呈現出百家爭鳴的繁榮景象。
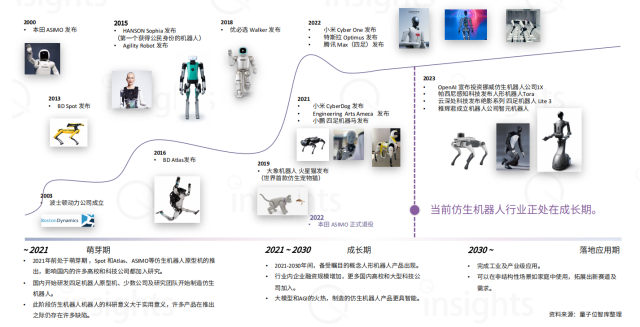
21世紀仿生機器人發展史
近年來,隨著人工智能的蓬勃發展,四足機器人領域也迎來了顯著的進步。自主性和智能性已成為四足機器人研究的核心內容。這些機器人不僅能夠感知周圍環境,還能夠自主規劃行動,并與環境進行有效交互。隨著技術的進步,智能四足仿生機器人已經逐漸成為救援領域的重要工具。越來越多的科技公司和救援組織開始將這一新型救援機器人納入其救援裝備之中。
本項目致力于開發一種基于四足仿生機器人載體結構的可穿戴式裝置,該裝置能夠實現從機器視覺到三維感知的升級。這一創新不僅顯著增強了四足仿生機器人的功能,還極大提升了搜救人員的工作效率。通過增強對災區環境的探知能力,四足仿生機器人能夠顯著縮短搜救時間,使搜救人員能夠迅速準確地定位受困人員。利用其小巧靈活的體型,四足仿生機器人能夠快速為受困者提供必要的應急援助和通信支持。
此外,我們正致力于拓展智能四足仿生機器人之外的四足仿生機器人的應用領域。這一戰略決策旨在將四足機器人的潛力拓展到更廣泛的應用場景。除了在緊急救援和危險環境中的應用,四足仿生機器人在農業、建筑、娛樂、物流和醫療服務等多個行業均有巨大的應用潛力。
通過開發新的應用場景,我們不僅為四足仿生機器人的產業鏈注入了新的活力,同時也為相關行業提供了創新的解決方案,幫助它們提高效率、降低成本并提升服務質量。這種跨領域的應用拓展,也將推動四足仿生機器人技術的進一步創新和發展,為未來的技術突破奠定堅實的基礎。
1.2項目目標
本研究旨在通過獨立驅動的外接感應裝置,突破現有四足仿生機器人應用方向的固定性,實現一機多用的創新模式。這種外接設備的設計不僅能夠豐富四足仿生機器人的功能,還能有效解決市場上四足仿生機器人配備的冗余或不足問題,從而提升其市場適應性和用戶滿意度。
四足仿生機器人的內部主機與運動單元緊密連接,并與程序協同工作。通過外部手段,我們能夠有效地解決內部程序資源占用過高的問題,提高系統的運行效率和穩定性。這種外部解決方案不僅有助于優化四足仿生機器人的性能,還能降低內部資源的浪費。
考慮到四足仿生機器人出廠時的版型固定和程序單一,外部手段可以為機構提供更靈活的解決方案,解決開發困難、內置算力不足以及感知設備更換復雜等問題。這種外部擴展的方法將有助于推動四足仿生機器人相關應用的發展,為各行各業提供更多定制化的選擇。
此外,這種創新的應用模式還將帶動新興產業的發展,為經濟增長注入新的活力。在緊急救援等關鍵領域,通過提高四足仿生機器人的功能和應用范圍,我們可以在救援效率上提供更高的便利與效率,從而更好地服務于社會和人民。
通過獨立驅動的外接感應裝置,我們將為四足仿生機器人領域帶來全新的發展機遇,打破傳統的局限,為四足仿生機器人的廣泛應用和產業升級提供強有力的支持。
1.3項目意義
獨立驅動的外接感應裝置為四足仿生機器人,提供了在實際應用場景中的功能拓展和多樣化用途,尤其在提升救援效率方面表現出顯著的優勢。此類創新設備賦予四足仿生機器人在復雜環境下執行多樣化任務的能力,如在災害現場進行搜索與救援、在危險環境中進行探測等,極大地增強了其應對緊急情況的能力。
為降低應用門檻,制造商應提供用戶友好的界面、詳盡的操作手冊以及用戶培訓和技術支持,使得缺乏技術背景的用戶也能迅速掌握四足仿生機器人的操作與維護。此外,開發模塊化和可定制化的組件,可讓不同行業根據特定需求快速部署和調整四足仿生機器人的功能。
這些措施不僅有助于四足仿生機器人產業鏈的拓展,也促進了相關科技的發展。隨著四足仿生機器人在多個領域的廣泛應用,將激發對新技術、新材料和新制造工藝的需求,從而推動整個產業的升級和創新。
四足仿生機器人產業的發展也將為社會創造新的就業機會。從研發、生產到銷售和服務,產業鏈的每一個環節都需要專業人員的參與,這不僅包括工程師和技術人員,也包括營銷、維護和客戶服務等職能部門。隨著產業規模的擴大,相關的職業培訓和教育資源也將得到進一步的發展,為社會提供更廣泛的職業發展路徑。
綜上所述,獨立驅動的外接感應裝置不僅提升了四足仿生機器人在實際應用中的多功能性和效率,而且對四足仿生機器人產業鏈的拓展、科技進步以及就業市場的活躍起到了積極的推動作用。
二、產品介紹
2.1技術方案
四足仿生機器人的可穿戴式獨驅感應裝置,集成了從機器視覺到三維感知的高級功能,標志著機械感知能力的重大進步。通過精心設計的硬件組合,高分辨率攝像頭與高精度激光雷達探測器被安裝在具備外接算力的設備上,實現了傳感器與處理器之間的高效互聯。
在首階段的開發中,采用了先進的多傳感器融合框架,如NeurlPS 2022,整合了激光雷達和攝像頭數據,并在算力設備上部署了相關程序,實現了實時數據處理和快速結果反饋。
該獨驅裝置的輕量化設計顯著減輕了四足仿生機器人的物理負擔,使其運動更加靈活迅速。裝置通過高速USB4.0接口與控制機構建立快速穩定的連接,確保了數據傳輸的高效率和可靠性。
借助增強的算力和感知能力,獨立驅動裝置顯著提升了四足仿生機器人在執行救援任務時的環境感知能力。它能夠快速識別和反應搜尋信息,提高了救援效率,并增強了四足仿生機器人的自我保護能力。這些改進不僅提高了四足仿生機器人執行復雜救援任務的有效性,還為操作人員提供了更高級別的操作安全性。
這一創新的獨立驅動裝置,通過提供先進的環境感知和快速反應能力,為四足仿生機器人在緊急救援和其他高風險環境中的應用開辟了新的可能性,并推動了相關技術的發展,為實現更安全、高效的機械救援操作奠定了基礎。
2.2核心功能
2.2.1多傳感器融合框架
我們采用高級別的融合算法,將來自激光雷達的3D邊界框與來自對相檢測算法的2D邊界框融合在一起。通過這種融合,我們能夠得到障礙物的位置、類別和速度的最佳估計,從而完成更加智能且實時的路徑規劃。
同時,我們還融合了軌跡跟蹤功能。根據物體現在及以前的運動軌跡,我們可以預判下一步的動作,繼而實現四足仿生機器人的緊急避障。這樣的設計使得機器人能夠更好地應對突發情況,提高其在復雜環境中的生存能力。
2.2.4算力的開發與應用
在硬件設備組裝完成之后,我們會進一步對外接算力進行首次開發。具體來說,我們會將相應的算法程序、環境部署以及訓練好的權重文件放入外界算力之中。通過這樣的布局,我們既能增強四足仿生機器人的感知能力,又不會影響過高的算力成本影響及四足仿生機器人主機內部的算力資源。
這樣的設計使得四足仿生機器人能夠更加智能地感知周圍環境,并根據需要進行相應的操作。同時,由于使用了外界算力,我們可以節省內部算力資源,降低整體成本。這種布局方式為四足仿生機器人的發展提供了更多的可能性和靈活性。
同時,為了實現更好的協同效果,我們還會在程序內部加入服務器的API。這樣可以實現在算法上的不斷完善迭代并同步到用戶程序。通過這種方式,我們可以確保四足仿生機器人能夠及時獲取最新的算法更新和功能改進,從而保持其先進性和競爭力。
此外,我們還會開發外接算力寫入讀取程序,并在連接機構的同時讀取機器狗內部的程序結構。這樣可以協助四足仿生機器人主機的運算,提高其處理能力和效率。通過充分利用外部算力資源和內部程序結構的協同工作,我們可以為四足仿生機器人提供更強大、更高效的計算支持,使其在各種復雜環境下都能夠表現出色。
2.2.3軌跡式可拆卸點陣單元磁吸結構與連接
底部采用軌跡式可拆卸點陣單元磁吸結構,在將其安裝到四足仿生機器人的背部之前,需要將平面的點陣單元小磁鐵進行撥動,使其避開四足仿真機器人背部的突出部分。這樣,我們就能夠很好地適配這些狗不同的背型,確保磁吸結構能夠穩定地固定在機器人的背部。
同時,我們通過USB4.0接口來進行四足仿生機器人與設備的連接。這種即插即用的設計使得整個連接過程變得非常簡單快捷,用戶無需進行復雜的設置或配置,只需將連接器插入機器人和設備即可實現快速連接。這種設計不僅提高了用戶體驗,還增強了產品的易用性。
三、市場運營與競爭分析
3.1市場背景
隨著時代的發展,國家對自然災害、火災等社會問題的關注日益增加,相關政策也日趨完善。與此同時,四足仿生機器人領域的研究與應用正迅速發展。為了提升四足仿生機器人在緊急救援任務中的效率,我們面臨一系列挑戰,包括機器人配備的冗余性或不足,以及其出廠時應用場景的局限性等問題。因此,增強四足仿生機器人的功能性能,拓展其應用范圍,并快速響應社會需求的復雜性,已成為當前研究的重點。
自仿生四足機器人誕生至今,已有四十多年的研究歷程。從我國政策導向來看,引入機器人以滿足市場需求,已成為一個具有巨大潛力的新領域。近年來,我國及全球范圍內自然災害和火災的頻發,影響范圍廣泛,這進一步推動了智能機器人在救援領域的應用。在發展新型生產力、解決社會問題、促進就業和推動經濟增長的閉環效益驅動下,智能機器人在救援領域的應用和產業正在不斷擴展。
3.2市場前景
最新研究數據表明,2021年全球仿生四足機器人市場的估值約為492億元人民幣,預計到2026年將增長至1558億元,年復合增長率(CAGR)為25.93%。中國在這一全球市場中占據了顯著的份額,預計未來六年中國市場的年復合增長率將達到27.01%,至2028年市場規模有望達到700億元。
亞太地區,尤其是日本、韓國、印度和東南亞地區,預計將在市場中扮演更加重要的角色。在歐洲,德國預計將保持其領先地位,2022至2028年間的年復合增長率預計為20.87%。美國目前是全球最大的生產地區,占據了約39%的市場份額,其次是中國,市場份額約為28%。
這些數據揭示了仿生四足機器人市場的發展動態和增長潛力。在四足仿生機器人產業中,各國的主流產品展現了其獨特的特點和技術優勢。例如,美國的Spot系列四足仿生機器人、瑞士的ANYmal以及中國的四足仿生機器人等均在市場上占有一席之地。這些機器人在多個領域,包括物資運輸、軍事用途、偵察引導、巡邏、教育和快遞服務等,已經進行了廣泛的測試,并顯示出巨大的應用潛力。
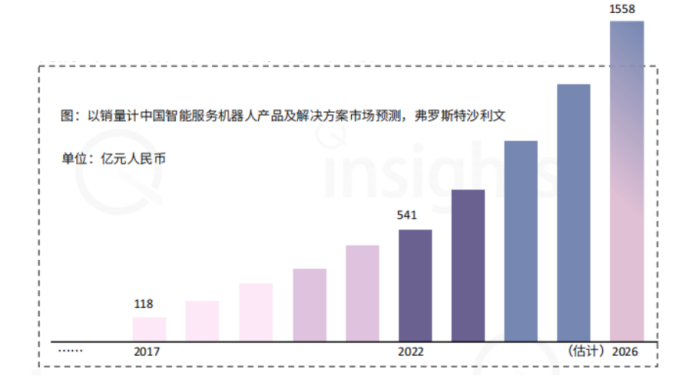
仿生機器人市場規模發展圖


